智能視頻分析
基於目標行為的智能監控技術
智能視頻分析在國際上有多種叫法,比如VCA(Video Content Analysis)、VA(Video Analysis)、IVA(Intelligent Video Analytics)、IV (Intelligent Video)、IVS(Intelligent Video System)。
這是計算機圖像視覺技術在安防領域應用的一個分支,是一種基於目標行為的智能監控技術。區別於傳統的移動偵測(VMD - Video Motion Detection)技術,智能視頻分析首先將場景中背景和目標分離,識別出真正的目標,去除背景干擾(如樹葉抖動、水面波浪、燈光變化),進而分析並追蹤在攝像機場景內出現的目標行為。
智能視頻分析與移動偵測的本質區別是前者可以準確識別出視頻中真正活動的目標,而後者只能判斷出畫面變化的內容,無法區分目標和背景干擾。所以智能視頻分析相對於移動偵測,抗干擾能力有質的提高。使用智能分析技術,用戶可以根據的實際應用,在不同攝像機的場景中預設不同的報警規則,一旦目標在場景中出現了違反預定義規則的行為,系統會自動發出報警。報警信息有多種形式,包括本地驅動報警設備和向後端監控中心發送報警數據,由監控工作站控制以彈出視頻、自動彈出報警信息、驅動報警設備等形式報警。
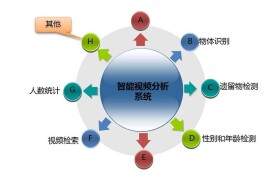
智能視頻分析的技術原理是接入各種攝像機以及DVR、DVS及流媒體伺服器等各種視頻設備,並且通過智能化圖像識別處理技術,對各種安全事件主動預警,通過實時分析,將報警信息傳導綜合監控平台及客戶端。具體來講,智能視頻分析系統通過攝像機實時“發現敵情”並“看到”視野中的監視目標,同時通過自身的智能化識別演演算法判斷出這些被監視目標的行為是否存在安全威脅,對已經出現或將要出現的威脅,及時向綜合監控平台或後台管理人員通過聲音、視頻等類型發出報警。
智能視頻分析技術,在國外已經有近10年的發展與應用,國際上比較著名的專業智能視頻分析廠商有VCA Technology、IOImage、ObjectVideo、Bosch、Axis,另外IBM、Sony、松下、PELCO、霍尼韋爾、西門子等公司在該領域也有相當有影響力的整體解決方案產品。國內的智能視頻分析解決方案廠商主要有廣州中國科學院軟體應用技術研究所、海康、大華、博康以及一些專門提供智能視頻分析關鍵設備的廠商如優迪數碼、貝爾信、高德威、中盛益華等公司。
智能視頻分析技術廣泛應用於公共安全相關係統,建築智能化,智能交通等相關領域。
智能視頻分析技術用於視頻監控方案通常有兩種,第一種是基於智能視頻處理器的前端解決方案。在這種工模式下,所有的目標跟蹤、行為判斷、報警觸發都是由前端智能分析設備完成,只將報警信息通過網路傳輸至監控中心。第二種是基於工業計算機的後端智能視頻分析解決方案。這種模式下,所有的前端攝像機僅僅具備基本的視頻採集功能,而所有的視頻分析都必須彙集到後端或者關鍵節點處由計算機統一處理。市場中,第一種方式應用居多,視頻分析設備被放置在IP攝像機之後,這樣可以有效的節約視頻流佔用的帶寬。而基於工業計算機的解決方案只能控制若干關鍵的監控點,並且對計算機性能和網路帶寬要求比較高。
智能視頻分析首先要求用戶指定一個檢測區域,該檢測區域可以是不規則的任意形狀,然後在該區域中啟用各種檢測功能。智能視頻分析支持的檢測功能主要有:
入侵檢測:主要是目標存在檢測功能
1.
入侵檢測:主要是目標存在檢測功能
通過對監控圖像序列的處理和分析,識別物體入侵的行為,並且對有潛在危險的行為進行報警,以避免危險事故的發生,從而有效地保證安全。

智能視頻分析

智能視頻分析
4.進入檢測:檢測是否有目標進入指定的檢測區域。
5.離開檢測:檢測是否有目標離開指定的檢測區域。
6.出現檢測:檢測是否有目標在指定檢測區域內部出現。
7.消失檢測:檢測是否有目標在指定檢測區域內部消失。
8.徘徊檢測:檢測目標在指定檢測區域內徘徊的時間是否超過設定的時間。
9.尾隨檢測:檢測是否有目標尾隨其它目標通過指定檢測區域
10.停止檢測:檢測目標是否在指定的檢測區域內停止超過設定的時間。
11.方向檢測:檢測目標是否在指定允許的方向範圍內前進
12.速度檢測:準確測量目標的實時速度。

智能視頻分析
14.高度檢測:測量目標的實際高度。
15.顏色檢測:檢測目標的顏色屬性,判斷目標的某種顏色所佔比例是否超過設定比例。
16.遺棄物檢測:檢測是否有物體遺留在指定的檢測區域內。
17.物品搬移檢測:檢測指定區域內是否有物體被搬走。
18.火焰檢測:檢測指定區域內是否有明火發生。
19.煙霧檢測:檢測指定區域內是否有煙霧產生。
20.計數功能:可以根據指定的區域或者劃線,設定各類規則進行精確計數。
21.遮擋檢測:檢測攝像機方向是否被改變、是否被遮擋、焦距是否被改變。
22.移動偵測:檢測畫面內容是否改變。
23.自動跟蹤:控制PTZ球機自動追蹤目標。
24.視頻穩定功能:將輸入的不穩定視頻(手持、車載、高空抖動)穩定后輸出。
25.目標密度檢測:檢測指定區域內是否有大量人群聚集。
傳統的入侵檢測普遍使用各類感測器(如紅外感測器)方案,這種方案的特點是檢測率高,但是成本高、誤報率高,無法立刻判斷報警是否為誤報,需要立刻派遣人員前往實地查看。對於大範圍的入侵監控,人力成本相當高。所以這種感測器入侵檢測方案一般都需要外加攝像機,用於遠程現場查看,這樣就提高了方案的總體成本。
基本智能視頻分析的入侵檢測方案已經是比較成熟的應用,普遍應用在機場周邊、監獄、黨政機關等場所,有著綜合成本低、人員需求少、檢測率高、誤報率低等優點。
入侵檢測一般使用虛擬圍欄設置,將關鍵設施的周邊設置為虛擬圍欄(檢測區域),在這些區域上應用存在檢測、進入檢測、出現檢測、徘徊檢測等功能。檢測到可疑目標時即觸發報警。
智能視頻分析可以有效的提升無人監守 自助銀行的防護水平,目前國內大多數銀行已經開始測試並啟用試點。自助銀行主要用到的監控方式有ATM機遺棄物和出鈔口異常檢測、鍵盤篡改檢測、警戒線內多人檢測、後台加鈔口入侵檢測、自助銀行室內過夜檢測、打架檢測、操作人員面部異常檢測。
1、車流總量(輛/小時):由用戶設定的時間間隔內檢測到車輛數量。
2、車輛速度(公里/小時):時間間隔內的平均速度。超過和低於用戶設閥值速度的車輛速度。
3、車間距(米):相鄰車輛之間的距離。
4、車輛密度:偵測監控視場內車輛的擁護程度。
5、排隊:可檢測車輛的排隊長度。
6、逆向行駛:反方向行駛的車輛。
7、跨線行駛的車輛:不按標線行駛的車輛。
8、違章停車:在非法停車處停車的車輛。
9、跨線行駛的車輛:不按標線行駛的車輛。
實際環境中光照變化、目標運動複雜性、遮擋、目標與背景顏色相似、雜亂背景等都會增加目標檢測與跟蹤演演算法設計的難度,其難點問題主要在以下幾個方面:
背景的複雜性:光照變化引起目標顏色與背景顏色的變化,可能造成虛假檢測與錯誤跟蹤。採用不同的色彩空間可以減輕光照變化對演演算法的影響,但無法完全消除其影響;場景中前景目標與背景的相互轉換,與行李的放下、拿起,車輛的啟動與停止;目標語背景顏色相似時會影響目標檢測與跟蹤的效果;目標陰影與背景顏色存在差別通常被檢測為前景,這給運動目標的分割與特徵提取帶來困難。
目標特徵的取捨:序列圖像中包含大量可用於目標跟蹤的特徵信息,如目標的運動、顏色、邊緣以及紋理等。但目標的特徵信息一般是時變的,選取合適的特徵信息保證跟蹤的有效性比較困難。
遮擋問題:遮擋是目標跟蹤中必須解決的難點問題。運動目標被部分或完全遮擋,又或是多個目標相互遮擋時,目標部分不可見會造成目標信息缺失,影響跟蹤的穩定性。為了減少遮擋帶來的歧義性問題,必須正確處理遮擋時特徵與目標間的對應關係。大多數系統一般是通過統計方法預測目標的位置、尺度等,都不能很好地處理較嚴重的遮擋問題。
兼顧實時性與魯棒性:序列圖像包含大量信息,要保證目標跟蹤的實時性要求,必須選擇計算量小的演演算法。魯棒性是目標跟蹤的另一個重要性能,提高演演算法的魯棒性就是要使演演算法對複雜背景、光照變化和遮擋等情況有較強的適應性,而這又要以複雜的運算為代價。
基本信息
- 中文名
- 智能視頻分析
- 別名
- VCA等
- 運用領域
- 安防領域
- 技術支持
- 計算機圖像視覺技術