防追尾系統
防追尾系統
防追尾系統不但可以防止高速公路汽車追尾,而且具有防止對面碰撞,繞過障礙物,防止汽車撞人等許多優點。隨著技術的不斷完善,該系統可以滿足更多的要求。目前,實際應用中較為困難的是超聲波成像系統,以及隨後的圖像處理部分,它涉及到圖像處理的小波分析、系統辨識、模式識別和專家系統等多種現代控制技術。整個系統的信號處理還需模糊控制理論作為基礎。它的工作環境惡劣,需抗振和抗干擾雜訊,這又增加了輔助設備及機構。
系統分為6個子系統和一個資料庫管理子系統,它們的組成和基本功能分別如下。
此系統的目的是在汽車啟動的同時,檢測防追尾系統是否工作正常,防止系統出錯。若正常,則啟動汽車;否則,提示駕駛員,該系統不能正常工作,請求檢修。
行車環境監測子系統(包含信號採集)是防追尾的最基本的子系統,整個系統的判斷是由它提供的數據。行車環境監測系統由測量車間距離和前面車輛方位的電磁波發射接收系統及能夠判定路面狀態的路況監測感測器所組成,發射系統起測距和成像作用。電磁波發射后,經障礙物反射,由接收系統接收到信號以備後面的其他子系統處理。這裡的電磁波發射可以選用雷達激光掃描儀,或者超聲波發射器,或紅外線測量儀,後面還牽涉到成像分析,信號處理。紅外測量儀只能測距;超聲波發射器和後面的信號處理系統可以識別障礙物,且圖像處理也不是很麻煩;雷達激光掃描儀存在後續信號處理困難的問題。路況監測感測器的作用是監測路況,以及路面能達到的最大加速度,輪胎和路面的附著力。此子系統中還有測定本車速度的感測器。
信號處理子系統是本系統的核心,它可由專門的數字信號處理晶元及其外圍設備構成,也可用單片機處理,但考慮到其信號處理複雜,且有圖象處理,一般的單片機可能無法達到要求,所以推薦用DPs芯戶處理數據。信號處理子系統接收到行車環境監測子系統的信號后,經A/D轉換,數字濾波,小波分析和圖象識別,判斷前面接收到的信號(障礙物)是什麼。若是汽車(主要處理情況),則提取數據,計算相對速度,再結合路況監測感測器傳回的數據,判斷是否有追尾的可能,即計算追尾概率的大小。要是有可能(概率大),提示駕駛員減速;若駕駛員沒有動作,在一定的時間延遲后,啟動電子控速子系統;在一定的安全臨界距離時,若按當前速度,還有追尾的可能,則啟動自動轉向子系統。若是其他障礙物,直接進人下一步。
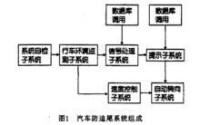
圖1
當前車和後車超出臨界最小距離時,信號處理子系統計算出目前的減速度不能避免追尾,且前面的車沒有轉向,則自動轉向子系統啟動,該車自動轉向,這是該系統的最後防禦系統。
高速公路上的追尾事故大部分是“高速”引起的,速度控制子系統並不是控制汽車的最高速度。其工作原理是:系統首先設定最高速度(如140km/h),當超過設定速度時,系統提示駕駛員小心行駛,而追尾概率達到一定程度時,駕駛員還沒有動作,啟動自動減速裝置,從而避免追尾。
系統流程如圖2所示。汽車啟動后,系統自檢子系統檢測系統是否能正常工作,若能正常工作,則汽車可以行駛。如果系統不能正常工作,調用資料庫,提示駕駛員該系統不能正常工作,是排除故障後行駛,還是不用該系統直接行駛,若直接行駛,提示駕駛員小心行駛;反之則給出排除該故障的參考建議。
汽車行駛過程中,環境監測子系統隨時監測行車環境,路面狀況,能達到的最大減速度,以及是否存在障礙物,並根據路況算出大概的臨界距離(臨界距離隨兩車的相對速度及路況的不同而不同)和危險距離(即兩車距離非常接近,極有可能追尾的距離,這是一個動態的過程。

圖2