點雲
和目標表面特性的海量點集合
在逆向工程中通過測量儀器得到的產品外觀表面的點數據集合也稱之為點雲,通常使用三維坐標測量機所得到的點數量比較少,點與點的間距也比較大,叫稀疏點雲;而使用三維激光掃描儀或照相式掃描儀得到的點雲,點數量比較大並且比較密集,叫密集點雲。
點雲是在和目標表面特性的海量點集合。
根據激光測量原理得到的點雲,包括三維坐標(XYZ)和激光反射強度(Intensity)。
根據攝影測量原理得到的點雲,包括三維坐標(XYZ)和顏色信息(RGB)。
結合激光測量和攝影測量原理得到點雲,包括三維坐標(XYZ)、激光反射強度(Intensity)和顏色信息(RGB)。
在獲取物體表面每個採樣點的空間坐標后,得到的是一個點的集合,稱之為“點雲”(Point Cloud)。
點雲
稀疏點雲或密集點雲都是逆向造型的基礎,有不少專門的逆向軟體能夠進行點雲的編輯和處理,比如imageware、geomagic、copycad和rapidform等等。
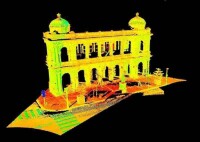
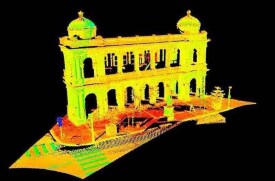
當一束激光照射到物體表面時,所反射的激光會攜帶方位、距離等信息。若將激光束按照某種軌跡進行掃描,便會邊掃描邊記錄到反射的激光點信息,由於掃描極為精細,則能夠得到大量的激光點,因而就可形成激光點雲。

典型的密集點雲
基本信息
- 點雲的格式
- *.las ;*.pcd; *.txt
- 屬性包括
- 空間解析度,點位精度
- 簡介
- 同一空間參考系下表達目標空間
- 中文名
- 點雲
- 外文名
- Point Cloud