旋轉機械裝置
旋轉機械裝置
旋轉機械自動平衡裝置主要分為兩類,一類為微機控制型;另一類為自動定心型。自動定心型轉子自動平衡裝置具有結構簡單、工作可靠、成本低廉、不需提供外部能源,並且能夠對轉子不平衡進行自動調節等優點,但具有在亞臨界狀態會加大轉子的不平衡量的特性,使得這類自動平衡裝置當必須在過臨界轉速的狀態下運行時,才能起到自動平衡的作用,因此存在不能在全轉速下進行平衡調節的缺點,應用中具有一定的局限性,目前多應用於高速旋轉機械中。
旋轉機械的振動問題一直是機械行業的重要課題,特別是現代旋轉機械的轉子轉速不斷提高,直接影響旋轉機械工作效率和可靠性的振動問題就更為突出。解決這一問題的有效方法就是對其旋轉部分(即轉子)進行高精度的動靜平衡,其平衡理論的宗旨就是通過改變轉子本身的質量分佈來達到其主慣性軸與旋轉軸相重合,從而降低旋轉機械的振動。
自動定心型轉子自動平衡裝置根據所採用的自由移動補償質量的形式分為滾球式、擺錘式和充液式等幾類。它們都是根據柔性轉子和彈性支承的特性而設計的,不需要外部專門提供能量,利用系統響應所形成的能量來驅動平衡質量的運動,從而達到減振的效果。
1、滾球式自動平衡裝置
(1)滾球式自動平衡裝置的工作原理
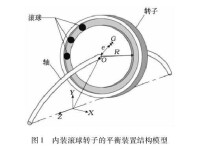
滾球式自動平衡裝置是根據柔性轉子和彈性支承的特性設計的,利用系統響應所形成的能量來驅動滾球的移動和分佈,滾球的移動和分佈也會影響不平衡轉子的振動情況。內裝滾球轉子的平衡裝置結構模型如圖 1 所示,轉子是一個帶有滾道的圓盤,圓盤中心開有孔,與轉軸固聯。圓盤中心位於點O。在點G處存在一個偏心質量 m1,偏心距為e。滾球放入圓盤周向的滾道內,滾道內有潤滑液,滾球僅能沿滾道做周向運動,球的數量一般在2個或2個以上。
旋轉機械裝置
(2)滾球式自動平衡裝置的特點
1)滾球式自動平衡裝置在高速狀態下能很好地起到平衡作用,不管偏心量大小,也不需要使用者調試和控制,平衡作用是自動發揮的,而且在一定條件下能完全平衡。
2)滾球的滾動摩擦因數μ將影響球的安定位置,進而成為影響殘餘振幅的決定性參數。可選用光滑、質硬的材料製造滾道和球,以便減小μ,但μ過小則使球不易穩定。
3)滾球的黏性阻力係數會影響最大振幅和自激振動的程度,但與殘餘振幅無關,因此可取較大的黏性阻力係數來減少最大振幅和自激振動。
4)滾球式自動平衡裝置不能使用於低速和共振狀態。
2、擺錘式自動平衡裝置
(1)擺錘式自動平衡裝置的工作原理
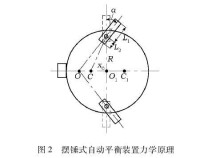
擺錘式自動平衡裝置利用了轉子的自動定心原理。擺錘式自動平衡裝置力學原理如圖所示,圖所示為具有兩個擺錘的轉子平衡裝置,每個擺錘均可繞其各自的鉸接點轉動。
旋轉機械裝置
(2)擺錘式自動平衡裝置的特點
1)擺錘式自動平衡裝置在高速狀態下能很好地起到平衡作用,平衡作用是自動發揮的。
2)擺錘的摩擦因數將影響擺錘的位置,進而成為影響殘餘振幅的決定性參數。可選用光滑、質硬的材料製造銷軸和擺錘。
3)擺錘式自動平衡裝置不能使用於低速和共振狀態。
3、充液式自動平衡裝置
(1)充液式自動平衡裝置工作原理
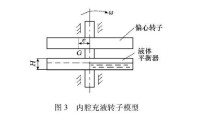
內裝部分液體的轉子是自動平衡裝置的另一種形式,被廣泛應用於洗衣機和液力偶合器中,以實現自動平衡和減振的作用。內腔充液轉子模型如圖所示,m1為偏心質量,e為偏心距,m2為轉子質量,m3為液體質量,ρ為液體密度,H為液體平衡器的厚度,G為轉子質心。
旋轉機械裝置
通過受力分析和推導,當 ω≥ωn時,偏心質量與軸線彎曲方向相反,說明液體起到了衰減振幅的作用。由此可見,在過臨界轉速下運行時,液體起到了自動平衡的作用;但其同樣存在當轉子處於亞臨界轉速時反而會使振幅增大的弊端。
(2)充液式自動平衡裝置的特點
1)充液式自動平衡裝置在高速狀態下能很好地起到平衡作用,平衡作用是自動發揮的。該裝置不能使用於低速和共振狀態。
2)與球式和擺錘式的“自動平衡裝置”相比,充液式自動平衡裝置結構簡單,製作精度不高,造價低廉;但它只能減振,滾球式自動平衡裝置在理想情況下卻能完全消除振動,即完全平衡。
3)充液式自動平衡裝置可以有多種安裝方式,通用性強。
為了能定量地表徵滾球式、擺錘式及充液式自動平衡裝置的減振效益,用減振倍數 A 作為衡量指標,它是偏心轉子安裝自動平衡裝置前後的振幅比。通過課題組近幾年的大量試驗觀測和理論計算得出三種平衡裝置的減振效益如下。滾球式減振效益最好,當滾球的總質量之和大於偏心量時,且ω>ωn,球遠離偏心質量,起到平衡作用。如果在沒有摩擦力的理想情況下,滾球可以使轉子達到完全平衡,振動將被完全消除。自動平衡裝置的減振倍數A將達到無窮大。擺錘式在沒有摩擦和合理幾何參數的理想條件下,減振倍數A遠大於1(轉子質量與擺錘質量之比) 。充液式減振效益相比之下較差,減振倍數僅為總質量與轉子質量之比,一般情況下轉子質量較大,故充液式減振倍數是介於1和2之間。相比之下:滾球式平衡效果最好,擺錘式次之,充液式較弱。但滾球式需要安裝專門的高精度滾道,對加工工藝精度要求較高;擺錘式可以考慮在原轉子上直接懸掛擺錘即可,安裝較便捷;充液式結構簡單,製作精度不高,造價低廉。因此,在具體應用時結合工藝系統、經濟成本等多方因素綜合考慮,擇優選擇。
