反饋系統
基於反饋原理建立的自動控制系統
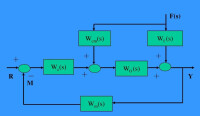
反饋系統是基於反饋原理建立的自動控制系統。所謂反饋,就是根據系統輸出變化的信息來進行控制,即通過比較系統行為(輸出)與期望行為之間的偏差,並消除偏差以獲得預期的系統性能。在反饋控制系統中,既存在由輸入到輸出的信號前向通路,也包含從輸出端到輸入端的信號反饋通路,兩者組成一個閉合的迴路。因此,反饋系統又稱為閉環控制系統。反饋控制是自動控制的主要形。
在工程上常把在運行中使輸出量和期望值保持一致的反饋控制系統稱為反饋系統,即自動調節系統,而把用來精確地跟隨或復現某種過程的反饋控制系統稱為伺服系統或隨動系統。
反饋系統
開環控制系統的優點是結構簡單,比較經濟;缺點是無法消除干擾所帶來的誤差。
同開環控制系統相比,閉環控制具有一系列優點。在反饋控制系統中,不管出於什麼原因(外部擾動或系統內部變化),只要被控制量偏離規定值,就會產生相應的控制作用去消除偏差。因此,它具有抑制干擾的能力,對元件特性變化不敏感,並能改善系統的響應特性。但反饋迴路的引入增加了系統的複雜性,而且增益選擇不當時會引起系統的不穩定。為提高控制精度,在擾動變數可以測量時,也常同時採用按擾動的控制(即前饋控制)作為反饋控制的補充而構成複合控制系統。
主要從三方面比較:
工作原理:合閉環控制系統不管出於什麼原因(外部擾動或系統內部變化),只要被控制量偏離規定值,就會產生相應的控制作用去消除偏差。控制精度和抑制干擾的性能都比較差,而且對系統參數的變動很敏感。因此,一般僅用於可以不考慮外界影響,或慣性小,或精度要求不高的一些場合。
結構組成:開環系統沒有檢測設備,組成簡單,但選用的元器件要嚴格保證質量要求;反饋系統具有抑制干擾的能力,對元件特性變化不敏感,並能改善系統的響應特性。
穩定性:開環控制系統的穩定性比較容易解決;反饋系統中反饋迴路的引入增加了系統的複雜性。
根據系統的反饋原理,反饋控制系統可分為:負反饋控制系統、正反饋控制系統。
當一個系統的活動處於某種平衡或穩定狀態時,如果因某種外界因素使該系統的受控部分活動增強,則該系統原先的平衡或穩定狀態遭受破壞。在存在負反饋控制機制的情況下,如果受控部分的活動增強,可通過相應的感受裝置將這個信息反饋給控制部分;控制部分經分析后,發出指令使受控部分的活動減弱,向原先的平衡狀態的方向轉變,甚至完全恢復到原先的平衡狀態。反之,如果受控部分的活動過低,則可以通過負反饋機制使其活動增強,結果也是向原先平衡狀態的方向恢復。所以,負反饋控制系統的作用是使系統的活動保持穩定。
在正反饋的情況下,受控部分的活動如果增強,通過感受裝置將此信息反饋至控制部分,控制部分再發出指令,使受控部分的活動更加加強,如此循環往複,使整個系統處於再生狀態。可見,正反饋控制的特性不是維持系統的穩態或平衡,而是破壞原先的平衡狀態。
基本信息
- 中文名
- 反饋系統
- 外文名
- feedback system
- 定義
- 是基於反饋原理建立的自動控制系統
- 所屬門類
- 機械、電力、計算機等
- 作用
- 自動調節