產業機器人
產業機器人
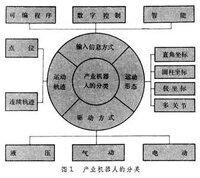
計算機控制的可再編程的多功能操作器,又稱工業機器人。產業機器人按輸入信息方式分類,可分為可編程序型機器人、數控機器人和智能機器人。產業機器人的應用能提高生產率,改善勞動條件,把人從危險、惡劣等勞動環境下替換出來,因此各方面對它的需求量日益增長,而自動控制、微型計算機的發展又為提高產業機器人的性能和降低成本創造了有利條件。產業機器人按手臂運動形態可分為直角坐標型(圖2c)、圓柱坐標型(圖2a)、極坐標型(圖2b)和多關節型(圖2d)。產業機器人具有識別對象的位置、狀況並作出相應動作的能力,便向智能化前進了一大步。
目錄
計算機控制的可再編程的多功能操作器,又稱工業機器人。它能在三維空間內完成多種操作。一般的產業機器人,如工業用機器人由手臂、腕、末端執行器和機身等部分組成,具有類似人類上肢的多自由度的運動功能,較高級的產業機器人是具有感覺、識別和決策功能的智能機器人。
發展概況產業機器人出現於20世紀50年代。1954年,美國的G.C.德沃申請具有記憶和重複操作功能的機器人專利。1958年根據這個專利研製出機器人樣機。1960年美國開始使用“產業機器人”一詞。1962年前後生產出弗塞特蘭和尤尼梅特兩種產業機器人產品。60年代中期,日本、英國等國相繼引進產業機器人並開展了相應的研究工作。產業機器人的應用能提高生產率,改善勞動條件,把人從危險、惡劣等勞動環境下替換出來,因此各方面對它的需求量日益增長,而自動控制、微型計算機的發展又為提高產業機器人的性能和降低成本創造了有利條件。據80年代初統計,世界產業機器人的台數每年以30~40%的速率增長。第一代的示教再現型產業機器人開始普及,具有感覺(觸覺、視覺等)功能的第二代產業機器人也開始投入使用。第三代產業機器人──智能機器人處於研究實驗階段。
產業機器人
示教再現機器人這種機器人的編程由操作員通過示教操作盤或直接把持操作器末端的執行器(手爪)來完成。機器人還通過具有存儲裝置的伺服控制系統把動作的相應位置、動作範圍、動作速度、順序等信息存入存儲器中,需要時讀出記憶的信息再現示教的動作。
70年代以來,出現了由微型計算機和介面組成的機器人控制系統,它由示教操縱器、控制板、鍵盤、顯示器等部分組成,只要輸入起點和終點的位置、運動軌跡和方向等數據,控制系統就能自動進行插值和坐標變換的幾何運算,然後將數據分配給機器人的各坐標系統以控制調節手爪的位置。採用示教方法編程比較費事,在現場編程時還得把生產停下來。如果採用程序設計語言,把機器人的程序編譯成人機對話形式,事先把程序和數據存儲在存儲器內,操作人員只要用程序語言在鍵盤上把指令輸入到計算機中,計算機就能通過記憶裝置、演算裝置和驅動裝置使機器人按指令完成動作。這種方式能在現場隨時編製程序。
有感覺的產業機器人一般的產業機器人沒有感覺,工件存放位置、姿態稍有改變機器人就束手無策。70年代以來出現帶有感測器的產業機器人。例如,加工用的機器人若裝上感測器(觸覺、視覺等),就能判斷工作對象的位置是否正確。如果工件在正確位置上就直接抓握,並把工件裝到機床或托板上,或者卸下來。如果工件的位置與規定位置不符,則根據感測器的信號進行修正後再抓握。具有視覺的適應系統是一種較為完善的機器人系統,它能根據視覺輸入信息及時在計算機中形成關節的位置和路徑數據,並將數據送至介面以控制手臂動作,而不必預先用編程方法確定位置和路徑數據。例如傳送帶上的零件是一個運動目標,機器人要跟蹤並抓起它就需要具有決策和適應能力,這就要求機器人確定在每一種情況下手應該在什麼位置,實時計算出所有關節的相應角位移。產業機器人具有識別對象的位置、狀況並作出相應動作的能力,便向智能化前進了一大步。
應用產業機器人主要用於工業領域,如壓力加工、機械加工、焊接、噴塗、裝配、電鍍、鑄造等。
壓力加工一般的壓力加工作業在一個工序上只進行幾秒鐘,由人取放工件具有很大的危險性。採用機器人來完成取料、上料、定位、加工、取出工件等作業,既能保證人身安全生產效率又高。
機械加工在機械製造廠中,工人勞動量約70%用於傳送和裝卸工件。這些操作雖然簡單,但由於要經常更換各種工件和刀具,加工工序多變,普通的裝卸和傳送機構很難勝任,只有用機器人才能實現這些操作的自動化。在單機或機械加工自動線上,可用機器人抓取傳送工件、刀具和材料等。機器人與數控機床、計算機輔助設計和製造等技術結合可構成柔性加工系統,實現生產過程高度自動化。
焊接焊接作業的環境惡劣,對人體有害,是應用機器人較多的領域。點焊機器人以固定在手部的電極來定位,按照對機器人示教的指令進行點焊作業。弧焊機器人能沿指定的輪廓,以符合電弧焊接規範的運動速度移動固定在手部的焊鉗進行焊接工作。在精密焊接中,需要採用帶視覺感測器的連續軌跡控制的機器人,靠感測器確定運動軌跡與焊縫中心的偏離量,併產生校正信號,控制撐動迴轉台的運動,使構件精確地處於理想焊縫位置上。此外,校正信號還通過參數控制介面來調整焊接電壓和焊絲的進給速度以保證焊縫質量。
噴塗噴塗也是對人體危害較大的作業。產業機器人在手部裝以噴槍,可對物件一邊作相對運動一邊噴塗。它能精確地控制噴槍與物件表面的距離,噴塗均勻、節省塗料(見噴漆機器人)。
裝配裝配是需要手工操作最多的工種之一。用一般的自動裝置無法替代。採用機器人可實現自動裝配。裝配機器人要比其他機器人更為靈巧和完善。例如人將軸承裝入軸承孔內是通過視覺和手指的感覺獲得配合是否準確的反饋信息,再通過手指對軸承不斷地進行調整,直到使兩者配合程度合適為止。機器人要做到這一點,必須裝上感測器,具有觸覺和視覺功能。70年代以來,已研製出自動裝配電機、制動器、打字機等產品的各種裝配機器人。
展望微型計算機、自動控制、機構學、模式識別和人工智慧的發展,為進一步提高產業機器人性能、降低成本和擴大應用範圍創造了技術條件。有待研究的課題涉及組合化、感測器、圖像識別、人工智慧、機器人用的高級語言、擴大應用範圍等方面的問題。①組合化、小型化和輕量化:從形態和結構上改進,研製成本低、能滿足多種要求的產業機器人系統。②感測器:研製觸覺感測器、力覺感測器、滑覺感測器等。視覺感測器除電視攝像機外,還研究採用紅外線、超聲波、磁場等手段的新型視覺系統。③智能機器人:利用模式識別技術作為識別外界環境的手段,研製能根據感覺信息採取某些決策行動的產業機器人,用於工廠生產線上的裝配和檢驗工序。④用於機器人的高級語言:在發展產業機器人的硬體的同時還須同時發展軟體,尤其是需要研製出適於產業機器人普及的高級語言。⑤擴展機器人的應用範圍:80年代以來,產業機器人的應用開始從機械工業向建築、採掘、農業、林業、水產、社會福利、原子能利用、宇宙開發、海洋開發等方面擴展。人們正在研製或完善建築用高空作業機器人、採掘作業機器人、水下機器人以及極限作業機器人等。
參考書目
合田周平、木下源一郎著,王棣棠譯:《機器人技術》,科學出版社,北京,1977。(合田周平、木下源一郎:《ロボツトエ學》ュロナ社,東京,1977。)
