實時反饋控制
實時反饋控制
反饋控制是指將系統的輸出信息返送到輸入端,與輸入信息進行比較,並利用二者的偏差進行控制的過程。實時控制利用數字電子計算機對事物連續變化過程的狀態及時收集,並按預先規定的程序選擇最佳方案,實現對事物變化過程的自動控制。
實時控制的範圍很廣,可以利用它精確控制導彈、衛星、火箭的發射過程和飛行過程;實現生產過程自動化或裝備數控機床;實現對各種生產過程的最優控制和鐵路運輸的調度和編組。隨著科學技術的進步,實時控制的應用領域更加廣泛,控制精度也將不斷提高。
實時反饋控制是指利用數字電子計算機對事物連續變化過程的狀態及時收集,並且將其作為系統的輸入信息,然後將系統的輸出信息返送到輸入端,與輸入信息進行比較,並利用二者的偏差進行控制的過程。
近年來,隨著計算機、通信等科學技術的快速發展與應用,網路化、嵌入式計算在控制系統工程中的重要性日益顯著。迄今為止,網路化嵌入式設備在應用數量上己經遠遠超過了各種通用計算機,其應用領域遍及航空航天、儀器儀錶、過程式控制制、通訊、軍事裝備以及消費電子等。在實時系統中,任務的正確性不僅依賴於結果在邏輯與數值上的正確性,而且還與結果的產生時間緊密相關。顯然,控制系統組成了一類極為重要的實時系統。由於實際應用中幾乎所有的控制系統都是採用數字技術並基於一定的計算、通信平台來實現的,因此實時性對於控制系統的設計與實現起著至關重要的作用。
以實時系統的觀點,系統的實時性在很大程度上取決於資源的可獲取性,即系統能否在特定的時間內成功獲得足夠的資源來完成任務的執行。在現代實時控制系統(Real-Time Control Systems, RTCS)中,典型的資源包括控制器處理能力 (CPU速率)、能量和通信網路帶寬等。與通用系統如桌面計算機不同的是,RTCS中絕大部分的網路化嵌入式平台都是資源受限的。其原因往往是多方面的。從技術角度看,由於實際應用需求等原因,嵌入式設備往往受到體積、重量等物理因素的限制,因而不可避免地導致了系統在CPU速率方面的局限性。為了提供確定性的實時通信,控制網路通常只能提供遠小於以太網( Ethernet)等非實時網路的數據傳輸速率。而對於越來越多的採用電池供電的嵌入式設備來說,能量則成了一個自然的約束,特別是在電池技術的發展還遠遠沒有跟上能耗增長腳步的今天。從經濟方面考慮,為了儘可能降低開發成本,在大多數情況下實際系統並不會選用速率最高的CPU或帶寬最大的通信網路,因為這些往往意味著過高的經濟代價。基於這個原因,儘管目前計算機、通信技術發展迅速,也提供了一些能力更強的硬體設備,但實際系統中大量應用的計算、通信平台往往只為滿足具體應用需求而配置,因而CPU處理能力、網路帶寬以及能量等都是有限的。
儘管存在資源約束,但實際RTCS應用的複雜度卻是越來越高。在許多場合,用戶功能需求的不斷增多、市場競爭的日益激烈等均是造成系統日益複雜化的驅動因素。於是,對於嵌入式環境下的大部分控制任務來說,以往專用的處理器將不復存在,不同任務不得不競爭同一處理器的使用。從某種意義上講,多個任務對處理器的共享加劇了對電池能量的消耗,使得對系統能耗的管理變得更加重要。同樣,隨著系統的日益複雜化,傳統點對點的通信方式也被網路化的通信體系所替代,多個節點必須在同一網路上傳輸數據。顯然,多個應用對系統資源的共享使得這些原本就相對有限的資源變得更加緊缺,從而可能影響到控制系統的實時性能。不幸的是,這個問題隨著一些COTS (Commercial Off The-Shelf)組件在RTCS中的不斷應用而變得更加嚴峻。出於成本、平均性能等方面的考慮,一些非實時的操作系統如Linux, Windows CE, TinyOS等和非實時的通信網路如Ethernet, WLAN ( Wireless Local Area Network)等被不斷地引入現代的實時控制應用中。由於這些組件不提供確定性的實時性服務,因此可能危害RTCS最終的控制性能。
與以往不同,如今的RTCS往往工作於以負載可變為新特徵的動態環境中。為了應對市場需求,實際應用系統的敏捷度、可重構性、可擴展性等不斷提高。這些特性使得在運行過程中對控制系統進行動態重組成為可能,從而方便了系統升級與維護,滿足了系統柔性化的需求。然而,對系統進行在線重組的一個直接結果就是系統負載也會隨之發生改變。比如,系統中原有的某些應用模塊可能會被移除,而新的應用模塊則可能被加入,或者僅僅由於對原有系統功能模塊的升級而改變了某些應用對共享資源的需求量。此時,無論系統更新是否涉及控制應用模塊,系統負載均會發生變化,從而影響到控制任務對共享資源的可獲取性。在資源受限的背景下,這種負載可變的動態環境無疑使得資源獲取的不確定性成為了制約實時控制性能的瓶頸所在,為RTCS的設計與實現提出了巨大的挑戰。
以控制的觀點,可用資源的不確定性將不可避免地導致控制迴路的時態不確定性,具體表現為時變延遲和丟包(數據丟失)等,從而降低系統控制質量( Quality of Control, QoC ) ,甚至造成系統不穩定。
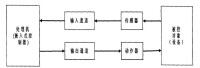
實時控制系統的規模無論大小,都包括如圖所示的基本組成部分:
1.輸入/輸出模塊,提供輸入/輸出通道。輸入通道通過感測器與被控設備介面取得設備的狀態信息,如溫度、壓力、流量、磁場強度等以及各種開/關狀態。輸出通道通過動作器與被控設備介面向設備傳送控制指令或設定各種控制量。
2.以微處理器為核心的處理器。
實時反饋控制
反饋控制是指將系統的輸出信息返送到輸入端,與輸入信息進行比較,並利用二者的偏差進行控制的過程。反饋控制其實是用過去的情況來指導現在和將來。在控制系統中,如果返回的信息的作用是抵消輸入信息,稱為負反饋,負反饋可以使系統趨於穩定;若其作用是增強輸入信息,則稱為正反饋,正反饋可以使信號得到加強。
在自動控制理論中,“反饋控制”是信號沿前向通道(或稱前向通路)和反饋通道進行閉路傳遞,從而形成一個閉合迴路的控制方法。反饋信號分“正反饋”和“負反饋”兩種。為了和給定信號比較,必須把反饋信號轉換成與給定信號具有相同量剛和相同量級的信號。控制器根據反饋信號和給定信號相比較后得到的偏差信號,經運算后輸出控制作用去消除偏差,使被控量(系統的輸出)等於給定值。閉環控制系統都是負反饋控制系統。
反饋控制具有許多優點。首先它為管理者提供了關於計劃執行的效果的真實信息。此外,反饋控制可以增強員工的積極性。
反饋控制的主要缺點是時滯問題,即從發現偏差到採取更正措施之間可能有時間延遲現象,在進行更正的時候,實際情況可能已經有了很大的變化,而且往往是損失已經造成了。
系統本身的工作效果,反過來又作為信息指導該系統的工作,叫做反饋調節。
對於一個實時的控制系統來說,可以根據控制方式和作用的效果分成以下幾種:
(1)開環控制系統
開環控制指一個控制系統作用於控制對象后,輸出不再影響系統。開環控制的控制結果不再對原系統的輸入產生作用。
開環控制一般使用靜態的模型,以離散狀態來描述描述連續的物理變化,非常不精確。交通信號控制中的TRANSYT系統和SCATS系統都是典型的開環控制系統。他們試圖用簡單的靜態數學模型來描述交通流的變化,而沒有意識到城市交通流的變化是一個複雜的不可預知的隨機過程,使用開環控制的方法不能夠適應交通流的隨機變化,控制效果自然會受到影響。
(2)被動響應式控制
響應式控制指動態獲得控制對象目前的狀態,然後做出反應,進行控制,改變控制對象的狀態,如此循環。響應式控制每次獲得對象當前狀態后再進行控制,具有滯后性,不能夠及時處理交通流的隨機變化。交通信號控制中的SCOOT系統採用的就是響應式控制,通過檢測器數據對當前交通流狀況進行優化,然後以小增量的方式作用於交通流。如圖所示,這種被動控制的方式使信號控制始終落後於交通流的變化,會造成控制效果的下降。
(3)主動自適應控制
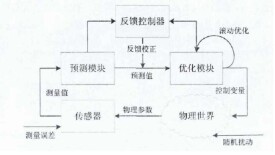
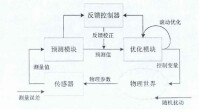
主動自適應控制方法通過閉環反饋的方法,使控制對象儘可能接近真實的情況。閉環反饋方法將系統的輸出值與期望值進行對比,通過差值修正系統參數,從而修正輸入,增加了系統的準確性和魯棒性。交通信號控制中的RHODES系統就採用了這一方法,使用檢測器獲得當前的真實數據,通過預測模型預測未來的狀態進行控制,對控制結果當時的真實情況進行對比,不斷修正預測模型來是預測值逼近真實情況,儘可能提高控制效果。
自適應交通信號控制系統的一般邏輯結構如圖所示,包括數據採集模塊、預測模塊、優化模塊、信號控制模塊。這幾個模塊完成了對實時交通流數據的採集、預測,信號優化和控制的整個流程。
實時反饋控制
非線性系統的閉環反饋控制在實際工程應用中有著重要作用,例如,可應用於混沌Genesio系統的控制與同步,永磁式步進電機的控制,繩系衛星系統的釋放與回收控制等等。與開環控制相比,閉環控制採用當前時刻的真實狀態求解當前時刻的控制輸入,可以有效地減小外部干擾對控制效果的影響。通過閉環反饋控制,可以使非線性系統更有效地達到穩定狀態。對於某些具有內在不穩定性的強非線性系統,例如繩系衛星系統的釋放與回收控制問題,閉環反饋控制相比開環控制有著不可替代的優勢。
滾動時域控制(Receding Horizon Control, RHC)作為一種有效的模型預測控制方法能夠起到閉環反饋控制的效果,且滾動時域控制能夠為線性與非線性系統的反饋控制提供一種相對簡單的方法,將其應用於線性時不變系統、線性時變系統以及非線性系統時,最終都能得到一個穩定的閉環系統。基於對偶變數變分原理與生成函數提出了一種求解線性系統滾動時域控制問題的保辛解法,此方法滿足最優控制解的最優性一階必要條件,這種保辛演演算法最終將線性滾動時域控制問題轉化成一組稀疏對稱非負定的線性方程組進行求解,避免了對Riccati微分方程的大量數值積分運算,從而提高了線性系統滾動時域控制問題的數值求解效率。
從數學結構上講,非線性最優控制系統可以採用Hamilton正則方程描述,而Hamilton系統的相流應當保持其本身固有的辛幾何結構。在求解過程中保持了原有系統的辛幾何結構,因此是一種保辛演演算法。將保辛方法從線性系統的閉環反饋控制推廣到非線性系統的閉環反饋控制。目前相對簡單且直接的一種求解非線性系統閉環反饋控制問題的方法是在每一個時間遞進步內,進行在線求解非線性最優控制問題並更新狀態和控制輸入,而大量在線直接求解非線性最優控制問題又導致較大的計算量和計算時間,不適應實時計算的要求。藉助於擬線性化方法,可將非線性最優控制系統轉化為線性非齊次Hamilton系統兩端邊值問題的迭代求解;而在每一個迭代步內,根據對偶變數變分原理與生成函數,將其轉化為係數非負定線性方程組的求解。
圖是FIB-CVD實時反饋控制的系統示意圖。通過使用測量精度達0.01 pA的超精密電流計測器(美國Keithley公司制,型號6514)實時監測試樣台的電流。實時(周期約為344 ms)獲取電流計測器上的電流數據,以此判斷懸臂結構的實時側向生長角度。如果生長角度偏離水平方向時,相應地增加或減少FIB的劑量直至側向生長角度回到水平方向。根據所要製備的懸臂式納米線結構和納米塊結構,分別使用常見的兩種FIB掃描方式,即模擬式掃描和離散式掃描。分別通過控制FIB掃描速度和單點照射時間來實時控制FIB的劑量。

實時反饋控制