機床坐標系
機床坐標系
在數控編程徠時為了描述機床的運動,簡化程序編製的方法及保證記錄數據的互換性,數控機床的坐標系和運動方向均已標準化,ISO和我國都擬定了命名的標準。機床坐標系(Machine Coordinate System)是以機床原點O為坐標系原點並遵循右手笛卡爾直角坐標系建立的由X、Y、Z軸組成的直角坐標系。機床坐標系是用來確定工件坐標系的基本坐標系。是機床上固有的坐標系,並設有固定的坐標原點。
在數控編程時為了描述機床的運動,簡化程序編製的方法及保證紀錄數據的互換性,以機床原點O為坐標系原點並遵循右手笛卡爾直角坐標系建立的由X、Y、Z軸組成的固定的直角坐標系。
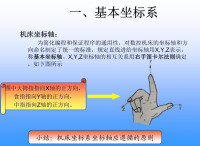
右手笛卡爾直角坐標系
2、永遠假設工件是靜止的,刀具相對於工件運動。
3、刀具遠離工件的方向為正方向。
1、先確定Z軸。
a、傳遞主要切削力的主軸為Z軸。
b、若沒有主軸,則Z軸垂直於工件裝夾面。
c、若有多個主軸,選擇一個垂直於工件裝夾面的主軸為Z軸。
2、再確定X軸。(X軸始終水平,且平行於工件裝夾面)
a、沒有迴轉刀具和工件,X軸平行於主要切削方向。(牛頭刨)
b、有迴轉工件,X軸是徑向的,且平行於橫滑座。(車、磨)
c、有刀具迴轉的機床,分以下三類:
Z軸水平,由刀具主軸向工件看,X軸水平向右。
Z軸垂直,由刀具主軸向立柱看,X軸水平向右。
龍門機床,由刀具主軸向左側立柱看,X軸水平向右。
3、最後確定Y軸。按右手笛卡兒直角坐標系確定。
1、旋轉運動。
繞X、Y、Z軸的旋轉運動分別用A、B、C來表示,按右手螺旋定則確定正方向。
2、附加軸。
a、附加軸的移動用U、V、W和P、Q、R表示。
b、附加軸的旋轉用D、E、F表示。
3、工件的運動。
工件運動的正方向與刀具運動的正方向正好相反。分別用+X’、+Y’、+Z’表示。
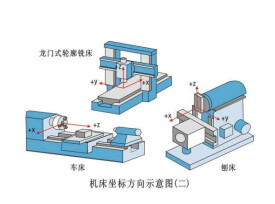
常見數控機床的坐標系。
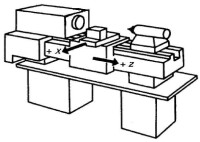
前置刀架數控車床的坐標系

後置刀架數控車床的坐標系
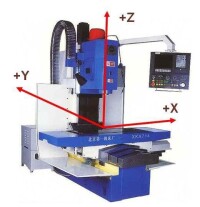
立式數控銑床的坐標系

機床徠坐標系
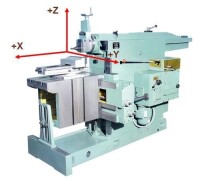
牛頭刨床的坐標系

龍門刨床的坐標系
基本信息
- 中文名
- 機床坐標系
- 外文名
- Machine Coordinate System
- 定義
- 描述機床的運動,簡化程序編製的方法及保證記錄數據的互換性
- 坐標原則
- 遵循右手笛卡兒直角坐標系
- 坐標軸
- 先確定Z軸