碼垛機器人
機械與計算機程序有機結合的產物
碼垛機器人,是機械與計算機程序有機結合的產物。為現代生產提供了更高的生產效率。碼垛機器在碼垛行業有著相當廣泛的應用。碼垛機器人大大節省了勞動力,節省空間。碼垛機器人運作靈活精準、快速高效、穩定性高,作業效率高。
徠碼垛機器人系統採用專利技術的坐標式機器人的安裝佔用空間靈活緊湊。能夠在較小的佔地面積範圍內建造高效節能的全自動砌塊成型機生產線的構想變成現實。
隨著我國經濟的持續發展和科學技術的突飛猛進,使得機器人在碼垛、塗膠、點焊、弧焊、噴塗、搬運、測量等行業有著相當廣泛的應用。
有很多個原因,包括包裝的種類、工廠環境和客戶需求等將碼垛變成包裝工廠里一塊難啃的骨頭。為了克服這些困難,碼垛設備的各個方面都在發展改進,包括從機械手到操縱它的軟體。市場上對靈活性的需求不斷增長,這一個趨勢已經影響到了包裝的多個方面,生產線的後段也不例外。零售客戶,尤其是那些具有影響力的如沃爾瑪一樣的大型超市,經常需要定製一些隨機貨盤,但是他們不得不定製每一個貨盤,而貨盤的形式只是偶爾會有重複。而且這類隨機的貨盤的高效生產是比較困難的。

碼垛機器人
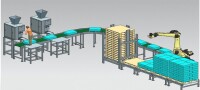
在工人完成產品的裝箱后,進入輸送線1,產品輸送到封箱機中,然後經過輸送線2,在2號線中有一個定位裝置也可稱定位擋板(已在娃哈哈生產線上成功應用),此裝置和定位板可以完成箱體的旋轉和定位,可以讓箱體靠左側定位,然後輸送到緩衝區1,緩衝區有一個助推裝置,此裝置可以將箱體合適的輸送到空閑的空間,在將裝滿的托盤推動動緩衝區2。緩衝區上方為碼跺機器人,機器人通過機械手吸盤將15個箱子(小袋裝可以碼15個,盒裝和聽裝可以碼8-10個)整體提升垂直提升,在水平運行,以躲避安全通道,寬度和高度均為2米,經過安全通道后垂直放置在碼跺區,前面的定位擋板已經將箱體旋轉,所以機械手不需要旋轉,在放置完成後,按照原路徑返回,碼跺區完成10層碼跺后,由叉車將其叉走,在放置空閑碼盤。前面的緩衝區2碼盤在箱體被移走後為空盤,由人工移走再等緩衝區1碼盤運送過來的時候放置在緩衝區1即可。
系統還設有緊急停止按扭,可手動、自動停止;機器人支承架工作範圍內裝有光柵安全系統,在故障或異常情況下報警信號燈亮,系統緊急停止,在手動狀態下排除報警后系統方可繼續運行;有自動記憶功能,在停電或故障情況后可繼續完成工作。
輸送線圖紙如下:
碼垛機器人
按照客戶提供的封箱時間15箱/分鐘,如果一個一個抓取箱體需要4秒一個運行周期,完成產品的提升,輸送,放置在按照路徑返回,由於下方是行走區域所以不能應用導軌的差補運動,只能走直線路程。要使用這樣的工作速度沒有完成的可能行,而且很不安全,按照箱體整體運送的方式,按照一個箱體輸送過來開始計算,一個碼盤裝滿需要60秒,在這60秒(另外兩個可以有32秒-40秒,可以碼8-10個),完成助推,抓取提升,輸送,放置和返回有充足的時間。
以上為箱體包裝的產品輸送方式,具體過程請參看效果圖。
大袋產品的生產周期為15秒/袋,所以直接完成單個碼跺輸送,時間也很充足,主要是負載不大,所以可以提高運行速率。
綜上所述,採用碼垛機器人後使搬運和碼垛的工作效率大為提高。省去大量人力,大量降低成人工成本。該機器人運行一年後就可收回所投入的成本。該機器人在正常維護下至少運行十年。隨著大批量全自動化碼垛生產線的興起,此碼垛系統將具有更加廣泛的市場前景和發展潛力!
碼垛機器人主要技術參數
MD-25T堆碼機器人
功率:三相,5KW,380V,50HZ/60Hz。
氣壓:3~6公斤/每平方厘米速度:25箱/分鐘。
碼垛機器人
對於隨機貨盤來說,碼垛機器人是唯一的選擇。儘管如此,機器人裝載也面臨比較多的問題,如果要以較高的速度進行生產,將更加困難重重。
一個處理隨機裝載的機器人碼垛機需要特殊的軟體,通過軟體,機器人碼垛機與生產線的其他部分相連接,這是個巨大的進步。
一徠個用來建造隨機貨盤的機器人能集成進工廠的倉庫管理系統(WMS)。理想上,它會成為WMS的前段,與倉庫軟體一起協調工作,來生產混合貨盤。
精密的軟體同樣能夠滿足對立即可上架貨盤的需求。一般來說,這就意味著產品碼垛好后,部分或者全部一次包裝容器的標籤都必須是朝外的。機器人碼垛設備還是另外一個苛刻應用的選擇:冷凍倉庫內碼垛。在消費商品包裝領域,在一個冷凍倉庫內處理箱子是最困難的工作之一。工人們不得不頻繁地交替工作來保持身體暖和,這就間接的降低了工作效率並提高了勞動力成本。
碼垛機器人
在冰凍環境下,自動化的隨機存取式碼垛機並不是正確選擇,因為大多數自動化隨機存取碼垛機都使用在冷庫里會結冰的壓縮空氣管。而與自動化碼垛機相比,碼垛機器人的尺寸更緊湊,由於冷凍倉庫中的空間十分寶貴,因此這點顯得尤為重要。儘管如此,機器人在冷凍倉庫中的應用也存在著一些問題。一些供應商開始為冷凍倉庫設計特殊的碼垛機器人。
在採用碼垛機器人的時候,還要考慮一個重要的事情,就是機器人怎樣抓住一個產品。真空抓手是最常見的機械臂臂端工具(EOAT)。相對來說,它們價格便宜,易於操作,而且能夠有效裝載大部分負載物。但是在一些特定的應用中,真空抓手也會遇到問題,例如表面多孔的基質,內容物為液體的軟包裝,或者表面不平整的包裝等等。
碼垛機器人
其他的EOAT選擇包括翻蓋式抓手,它能將一個袋子或者其他包裝形式的兩邊夾住;叉子式抓手,它插入包裝的底部來將包裝提升起來;還有袋子式抓手,這是翻蓋式和叉子式抓手的混合體,它的叉子部分能包裹住包裝的底部和兩邊。
將基本EOAT類型進行其他的組合也是可以的。一個飲料包裝商在對裝滿瓶子,並且收縮裹包好的瓦楞托盤進行碼垛時碰到了困難,真空吸盤會把托盤上的薄膜扯下來。

碼垛機器人
所需庫存零部件少。
2、佔地面積少。有利於客戶廠房中生產線的布置,並可留出較大的庫房面積。碼垛機器人可以設置在狹窄的空間,即可有效的使用。
3、適用性強。當客戶產品的尺寸、體積、形狀及托盤的外形尺寸發生變化時只需在觸摸屏上稍做修改即可,不會影響客戶的正常的生產。而機械式的碼垛機更改相當的麻煩甚至上是無法實現的。
4、能耗低。通常機械式的碼垛機的功率在26KW左右,而碼垛機器人的功率為5KW左右。大大降低了客戶的運行成本。
5、全部控制可在控制櫃屏幕上操作即可,操作非常簡單。
6、只需定位抓起點和擺放點,教示方法簡單易懂。

碼垛機器人

基本信息
- 中文名
- 碼垛機器人
- 外文名
- Palletizing Robot
- 含義
- 機械與計算機程序有機結合的產物
- 意義
- 為現代生產提供了更高的生產效率
- 領域
- 碼垛行業
- 特點
- 運作靈活精準、快速高效、穩定性高,作業效率高