空中交通管制系統
空中交通管制系統
空中交通管制系統是管理多架飛機起降和航行,以保障飛行秩序和安全的系統。
管理多架飛機起降和航行,以保障飛行秩序和安全的系統。為完成某些特定任務,必須制定一套規則,即確定出若干空中航路,使飛機按一定順序從各自機場起飛,進入航路並保持飛機間的一定距離間隔,到達終點前脫離航路並按一定順序降落。接受管制的飛機依靠目視、無線電通信和導航手段執行管制規則。
①防止飛機在空中相撞;
②防止飛機在跑道滑行時與障礙物或其他行駛中的飛機、車輛相撞;
③保證飛機按計劃有秩序地飛行;
④提高飛行空間的利用率。
第一代空中交通管制系統是在第二次世界大戰以前形成的,主要由沿航路布置的一些低頻導航站組成。飛行員通過導航掌握航向,靠保持沿航路飛行的時間或飛越固定點的時間間隔來避免相撞。這種系統是人工的,地面無法監視空中飛行。
第二代空中交通管制系統是在第二次世界大戰期間及以後,隨著雷達、伏爾導航系統、地美依導航系統和儀錶著陸系統的出現而發展起來的。它採用對飛機詢問識別的二次監視雷達,因而能有效地監視飛行,使管製作用大為提高。第三代空中交通管制系統出現於60年代,是一種雷達、通信和計算機相結合的半自動系統。
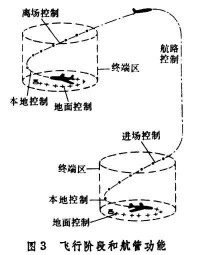
現代空中交通管制涉及飛行的全過程,即從駛出停機坪開始,經起飛爬升,進入航路,通過報告點到目的地機場降落為止,飛機始終處於監視和管制之下。在這個過程中,管制分為三級:塔台管制、進近管制和區域管制。
① 塔台管制:塔台設在機場,主要是維持機場的飛行秩序、指揮滑行和起降、防止碰撞。各國的管制範圍不一,視空域、飛行量和管制能力而定,在中國通常為100公里左右。
② 進近管制:對處於塔台管制範圍和區域管制範圍之間的進場或離場飛機實施管制。其範圍有時較大,可達180公里以上,可以包括幾個機場。
③ 區域管制:也稱航路管制,由區域管制中心執行,主要是使航路上的飛機之間保持安全間隔。它能對飛機實施豎向、縱向或橫向調配,以避免碰撞,確保安全。
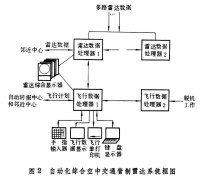
管制系統主要有兩類:執行塔台和進近管制的終端區管制系統,執行區域和高空管制的區域管制系統或區域管制中心。
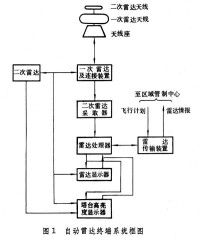
① 終端區管制系統:通常包括由一次雷達、二次雷達構成的數據獲取分系統、由電子計算機構成的數據處理分系統、由雷達綜合顯示器和高亮度顯示器構成的顯示分系統、以及由圖像數據傳輸、內部通信、對空指揮通信構成的通信分系統等,執行塔台和進近兩級管制任務。這個系統的主要功能是:對裝有應答機的飛機進行自動跟蹤;進行代碼呼號相關;顯示飛行航跡和有關數據;用人工輸入或直接接收鄰近管制中心的飛行計劃;對輸入的計劃進行簡單處理;進行低高度報警;與鄰近管制中心交換飛行數據。美國的自動雷達終端系統ARTS-Ⅱ和ARTS-Ⅲ是典型的終端區管制系統。前者用於中小型機場,後者用於大型機場(圖1)。
空中交通管制系統
空中交通管制系統
空域是指地球上空可供飛行的廣大空間,實際能利用的只是其中極小的一部分。在人口眾多的城市之間,大都划有空中航路。最為繁忙的地區是終端區和機場。飛機是從停機點轉到二維平面上起飛,又轉入三維空間飛行;相反的過程就是從飛行轉到停機。終端區和機場是飛行活動的集散處。
空中航路和航路網都是以國際標準導航系統,如伏爾導航系統、地美依導航系統、伏爾-地美依導航系統或伏爾塔克導航系統等作為地面基準規劃而成的。航路分為低、高兩層,低層從海拔200米起至5500米,適應低性能飛機飛行的需要;高層從 5500米至14000米,適應高性能飛機按儀錶飛行規則飛行。在 5500米至30000米間飛行的飛機,必須裝設合格的通信、導航、雷達信標應答器等設備。在 14000米以上,可依地面導航台直飛,而不限於規定的航路。
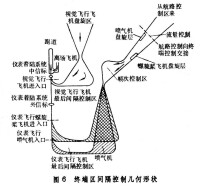
終端區是以機場為中心、以約10公里的半徑範圍向上延伸成圓形空域。海洋空域是國際空域,範圍在海岸線200公里以外,從海平面以上600~1500米起向上延伸。大陸上空還可根據需要劃分為禁飛空域、限制空域和飛行訓練空域等。
保持空中飛行間隔是保障飛行安全的重要方法。由於飛機飛行速度差別很大,一般規定,在無雷達監視的情況下縱向間隔應在20~40公里之內。地面沿途如用雷達監視,縱向間隔可減到5~10公里,垂直間隔須保持300米。橫向間隔指對面交錯或平行飛行,在5500米高度以下須保持15公里,在雷達監視時可減到6公里。在海洋上空,縱向間隔與橫向間隔可放寬到170~220公里。
在規定航道上飛行,除無線電導航設備保障飛行準確外,控制和監視飛行間隔是空中交通管制系統的主要職責。為此,空中交通管制系統大都採用控制放飛時間,以及飛機在規定地點和時間向地面報告位置等方法。如採用雷達監視,可連續監控間隔。飛機自備的防撞裝置尚處於研究之中。
空中交通管制系統
空中交通管制系統
空中交通管制電子系統包括通信、導航、監視、目標獲取和處理,以及顯示等設備。通信是最根本的航行管制手段。傳統方式是空中與地面之間用無線電話,地面之間用有線電話或無線電話。數字通信適應現代繁忙的飛行業務需要。雷達數據遙傳也屬於通信範圍。
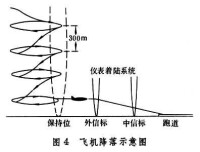
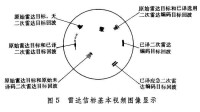
雷達是空中交通管制系統中非常重要的手段。雷達回波包含有豐富的信息,在航路上,一般使用航路監視雷達,覆蓋範圍可達370公里(半徑),監視高度可達18公里,但低空覆蓋範圍較差。航路雷達使用L頻段或S頻段。在終端區和機場上一般使用 S頻段雷達,其作用距離只要求 111公里。終端區雷達也可用來指引飛機進入跑道延長線上空。二次雷達即雷達信標,從地面向飛機發送詢問信號,飛機向地面應答(圖5)。詢問與應答信號均採用編碼方式,應答中含有飛機識別信息和高度數據。雷達信標可以單獨工作,但常與航路雷達和機場雷達配合工作。
空中交通管制系統
雷達數據顯示利用平面位置顯示器(見雷達顯示器),飛機回波呈現為小弧形,而動目標顯示電路所不能消除的氣象和地面回波則以大面積出現。二次雷達在圖像解碼器中只顯示回答碼正確的目標。
空中交通管制系統