聯機操作
聯機操作
聯機操作指的是通過通信設施將地理上分散的具有自治功能的多個計算機系統互連起來,實現信息交換,資源共享,互操作和協作處理的一個操作系統。
聯機操作系統就是在原來的各自計算機系統操作上,按照網路體系結構的各個協議標準進行開發,使之包括網路管理,通信,資源共享,系統安全和多種網路應用服務的操作系統。
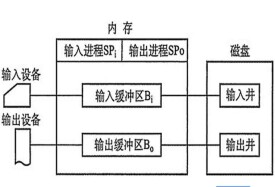
聯機操作也稱“聯機處理”、“聯線處理”。電子計算機進行數據處理的術語;主要有:(1)外存貯器、輸入輸出設備等與數據處理有關的一些設備同中央處理機相連,並在中央處理機直接控制下進行數據處理。(2)同能夠實時處理數據並作出必要判斷的電子計算機系統直接相連,進行數據處理。
聯機操作方法
手工操作方式允許用戶與機器隨機地直接交流信息,它是一種原始的聯機操作方式,工作效率極低。離線操作方式在一定程度上解決了機器的效率問題,實現了機器工作流程的自動化。但是,由於用戶不可能預料到作業運行過程中所出現的全部意外情況,因此。對於需要調試的程序來說,離線操作方式是不方便的。
根據上進分析,計算機系統設計者提出了一種更高一級的“聯機”方式,即計算機聯接若干個終端設備,用戶可以在終端設備上使用計算機。他們通過鍵盤打入操作命令控制作業的運行,而計算機則通過顯示屏報告命令的執行情況和顯示用戶所需要的信息,這種操作方式稱為“聯機操作方式”。
聯機操作方式的特點
1.多路調製性
多個聯機用戶可以通過終端設備(在宏觀意義下)同時使用計算機,從而提高了主機和外部設備的使用效率。
2.交互性
用戶親自在終端設備上與計算機對話。
3.獨佔性
每個用戶都不戚覺到別的用戶的存在,就好像是他本人獨佔了一台計算機一樣。
SCATS控制系統是一種實時方案選擇式自適應控制系統,由澳大利亞開發。20世紀70年代開始研究,80年代初投入使用。
SCATS的控制結構為分層式三級控制,由中央監控中心、地區控制中心和信號控制機構成。在地區控制中心對信號控制機實行控制時,通常將每1~10個信號控制機組合為一個子系統,若干子系統組合為一個相對獨立的系統。系統之間基本上互不相干,而系統內部各子系統之間,存在一定的協調關係。隨著交通狀況的實時變化,子系統既可以合併,也可以重新分開。三項基本控制參數的選擇,都以子系統為計算單位。
中央監控中心除了對整個控制系統運行狀況及各項設備工作狀態作集中監視外,還有專門用於系統資料庫管理的計算機對所有各地區控制中心的各項數據以及每一台信號控制機的運行參數作動態儲存(不斷更新的動態資料庫形式)。交通丁程師不僅可以利用這些數據作系統開發工作,而且可以在該機上離線完成斤發與設計工作。
SCATS在實行對若干子系統的整體協調控制的同時,也允許每個交叉口“各自為政”地實行車輛感應控制;前者稱為“戰略控制”,後者稱為“戰術控制”。戰略控制和戰術控制有機結合在一起,大大提高了系統本身的控制效率。SCATS正是用了設置在停車線附近的車輛檢測裝置,才能有效、靈活。因此,SCATS實際上是一種用感應控制對配時方案作局部調整的方案選擇系統。
SCATS優選配時方案的主要環節有:子系統的劃分合併、配時參數優化、信號周期長選擇、綠信比方案選擇、相位差方案選擇五部分。
SCOOT即綠信比一周期長一相位差優化技術,是一種對交通信號網實行實時協調控制的自適應控制系統。由英國TRRL於1973年開始研究開發,1979年正式投人使用。
SCOOT是在TRANSYT的基礎上發展起來的,其模型及優化原理均與TRANSYT相仿。不同的是SCOOT是方案形成式控制系統,通過安裝於各交叉口每條進口道上游的車輛檢測裝置所採集的車輛到達信息,聯機處理.形成控制方案,連續地實時調整綠信比、周期長及相位差3個控制參數,使之同變化的交通狀況相適應。SCOOT優化採用小步長漸近尋優方法,無需過大的計算量。此外,對交通網上可能出現的交通擁擠和阻塞情況,SCOOT有專門的監視和應付措施。它不僅可以隨時監視系統各組成部分的工作狀態,對故障發出自動報警;而且可以隨時向操作人員提供每一個交叉口正在執行的信號配時方案的細節情況,每一周期的車輛排隊情況(包括排隊隊尾的實際位置)以及車流到達圖式等信息,同時也可以在輸出終端設備上自動顯示這些信息。
SCOOT優選配時方案的主要環節包括:
(1)交通檢測。含交通量、車輛佔用時間、道路佔有率和擁擠程度等的參數檢測。
(2)小區劃分。SCOOT中的小區劃分應事兜判定,系統運行以小區為依據,運行中小區不能合併、拆分。
(3)模型預測。包括車隊預測、排隊預測、擁擠預測和效能預測等。
(4)系統優化。包括控制策略優化、綠時長綠信比優選、相位差優選和周期長度優選等。
基本信息
- 中文名
- 聯機操作
- 外文名
- online operatior
- 特點
- 多路調製性、交互性、獨佔性
- 組成設備
- 外存貯器、輸入輸出設備等
- 相關應用
- 監控、交通檢測
- 優點
- 提高工作效率