工業鏡頭
專業術語
工業鏡頭是專業術語,拼音為ɡōnɡ yè jìnɡ tóu,基本功能就是實現光束變換(調製),在機器視覺系統中,主要作用是將目標成像在圖像感測器的光敏面上。鏡頭的質量直接影響到機器視覺系統的整體性能,合理地選擇和安裝鏡頭,是機器視覺系統設計的重要環節。
選擇合適鏡,鏡選配需選擇攝尺寸匹配鏡。鏡式占流。型防攝普及、業則攝鏡組合。尺寸、市般根據途/寸/寸產品。
| CCD | CCD尺寸 | ||
| 水平:H | 垂直:V | 對角:D | |
| 1型 | 12.8 | 9.6 | 16.0 |
| 2/3型 | 8.8 | 6.6 | 11.0 |
| 1/2型 | 6.4 | 4.8 | 8.0 |
| 1/3型 | 4.8 | 3.6 | 6.0 |
| 1/4型 | 3.6 | 2.7 | 4.5 |
| 35mm膠片 | 36.0 | 24.0 | 43.3 |
鏡攝、攝互;
CS鏡攝,攝。
攝像機如果使用配備小CCD尺寸的鏡頭,那麼周邊沒有攝取到圖像的部分呈現出黑色,我們稱其為KERARE。
工業鏡頭
將折射率不同的各種硝材通過研磨,加工成高精度的曲面、把這些鏡頭進行組合,就是設計鏡頭。從伽利略時代開始使用的普遍技術是其基本原理。為得到更清晰的圖像,一直在研究開發試製新的硝材和非球面鏡片。
焦距是主點到成像面的距離。這個數值決定了攝影範圍的不同。數值小,成像面距離主點近,是短焦距鏡頭。這種情況下的的畫角是廣角、可拍攝廣大的場景。相反的、主點到成像面的距離遠時、是長焦距鏡頭,畫角變窄(望遠)。
鏡頭的明亮度與口徑和焦距的變化有關。一般用F值表示鏡頭的明亮度,另外鏡頭裡有用於調整亮度的光圈構件,可根據使用條件來調整通光量。
Y=f*tanθ y:像的大小 f:焦距θ:半畫角
θ=2tan-1*y/2f
例:1/2寸攝像機配12.5mm鏡頭時畫面橫向的視場面是:
θ=2tan-1*6.4/2*12.5=28.72
物體和鏡頭之間距離(W.D)雖然變化,介在前後一定範圍內所成像仍然感覺清晰,這個距離範圍補稱為景深。相反的,對應於確定的物平面,成像面和鏡頭之間的距離不同,但在一定的範圍內圖像仍感覺清晰,稱為焦深。
計算方式:
景深=F*ε*(1/β)
ε容許彌散園參數2/3=0.02、1/2=0.015、1/3=0.01、β倍率。
不同工業鏡頭的成像質量有著有著千差萬別,就算是同一類型的工業鏡頭也是如此,這主要是由於材質、加工精度和鏡片結構的不同等因素造成的,同時也導致不同檔次的工業鏡頭鏡頭價格從幾百元到幾萬元的巨大差異。比較著名的如四片三組式天塞鏡頭、六片四組式雙高斯鏡頭。對於鏡頭設計及生產廠家,一般用光學傳遞函數OTF (Optical Transfer Function)來綜合評價鏡頭成像質量,光學系統傳遞的是亮度沿空間分佈的信息,光學系統在傳遞被攝景物信息時,被傳遞之各空間頻率的正弦波信號,其調製度和位相在成實際像時的變化,均為空間頻率的函數,此函數稱為光學傳遞函數。OTF一般由調製傳遞函數MTF(Modulation Transfer Function)與位相傳遞函數PTF(Phase Transfer Function )兩部分組成。
像差是影響圖像質量的重要方面,常見的像差有如下六種:
球差:由主軸上某一物點向光學系統發出的單色圓錐形光束,經該光學系列折射后,若原光束不同孔徑角的各光線,不能交於主軸上的同一位置,以至在主軸上的理想像平面處,形成一彌散光斑(俗稱模糊圈),則此光學系統的成像誤差稱為球差。
慧差:由位於主軸外的某一軸外物點,向光學系統發出的單色圓錐形光束,經該光學系列折射后,若在理想像平面處不能結成清晰點,而是結成拖著明亮尾巴的慧星形光斑,則此光學系統的成像誤差稱為慧差。
像散:由位於主軸外的某一軸外物點,向光學系統發出的斜射單色圓錐形光束,經該光學系列折射后,不能結成一個清晰像點,而只能結成一彌散光斑,則此光學系統的成像誤差稱為像散。
場曲:垂直於主軸的平面物體經光學系統所結成的清晰影像,若不在一垂直於主軸的像平面內,而在一以主軸為對稱的彎曲表面上,即最佳像面為一曲面,則此光學系統的成像誤差稱為場曲。當調焦至畫面中央處的影像清晰時,畫面四周的影像模糊;而當調焦至畫面四周處的影像清晰時,畫面中央處的影像又開始模糊。
色差:由白色物體向光學系統發出一束白光,經光學系統折射后,各色光不能會聚於一點上,而形成一彩色像斑,稱為色差。色差產生的原因是同一光學玻璃對不同波長的光線的折射率不同,短波光折射率大,長波光折射率小。
在評價 工業鏡頭質量時一般還會從解析度、明銳度和景深等幾個實用參數判斷:
1. 解析度(Resolution):又稱鑒別率、解像力,指鏡頭清晰分辨被攝景物纖維細節的能力,制約工業鏡頭解析度的原因是光的衍射現象,即衍射光斑(愛里斑)。解析度的單位是“線對/毫米“ (lp/mm)。
2. 明銳度(Acutance):也稱對比度,是指圖像中最亮和最暗的部分的對比度。
3. 景深(DOF):在景物空間中,位於調焦物平面前後一定距離內的景物,還能夠結成相對清晰的影像。上述位於調焦物平面前後的能結成相對清晰影像的景物間之縱深距離,也就是能在實際像平面上獲得相對清晰影像的景物空間深度範圍,稱為景深。
4. 最大相對孔徑與 光圈係數:相對孔徑,是指該工業鏡頭的入射光孔直徑(用D表示)與焦距(用f表示)之比,即:相對孔徑=D/ f。相對孔徑的倒數稱為光圈係數(aperture scale),又稱為f/制光圈係數或光孔號碼。一般鏡頭的相對孔徑是可以調節的,其最大相對孔徑或光圈係數往往標示在工業鏡頭上,如1:1.2或f/1.2。如果拍攝現場的光線較暗或曝光時間很短,則需要盡量選擇最大相對孔徑較大的工業鏡頭。
工業鏡頭各參數間的相互影響關係
一支好的工業鏡頭,在解析度、明銳度、景深等方面都有很好的體現,對各種像差的校正也比較好,但同時其價格也會幾倍甚至上百倍的提高。如果我們掌握一些規律和經驗,就可以使用同檔次的工業鏡頭達到更好的效果。
1. 焦距大小的影響情況
焦距越小,景深越大;
焦距越小,畸變越大;
焦距越小,漸暈現象越嚴重,使像差邊緣的照度降低;
2. 光圈大小的影響情況
光圈越大,圖像亮度越高;
光圈越大,景深越小;
光圈越大,解析度越高;
3. 像場中央與邊緣
一般像場中心較邊緣解析度高
一般像場中心較邊緣光場照度高
4. 光波長度的影響
1. 調焦技術
對於鏡頭來講,不同物距上的目標成像的像距是不同的。對於需要觀察的目標,它的成像面不一定與相機感光面重合,為了得到清晰像,就需要調整成像面的位置使之與感光面重合,這個過程就是調焦。
整組移動
這種調焦方式,就是調節過程中整個鏡頭一起前後移動,帶動像面隨之移動,在像面與相機感光面重合時,成像最清晰。這種整體調焦方式,不改變鏡頭的光學結構,鏡頭焦距沒有變化。
單組移動
還有一種調焦方式,就是調節鏡頭中的某一組透鏡,使它想對於其他透鏡前後移動,也能帶動像面平移,最終使像面與感光面重合,達到成像清晰。這種調焦方式,改變了鏡頭的光學結構,鏡頭焦距有所變化(一般不大)。
例如,前面的透鏡組對無窮遠的目標成像在Image面上(也是CCD感光面位置),后工作距離L’,現在要對近處目標成像,像面位置在Image‘,為了成像清晰需要調焦。
一種辦法就是整個透鏡組一起相對CCD往前移動,使后工作距離擴大到L“,CCD感光面與像面重合,成像清晰。這種辦法就是整組移動式調焦。
還有一種調焦辦法:只移動透鏡組中的某一(或幾個一起)單透鏡,也能達到調焦的目的。將第四透鏡從位置A向前移動到A‘,對近距離的目標來說,成像面也回到與CCD重合的位置,使成像清晰。這種調焦方式就稱為單組移動式調焦。
2. 變焦技術
所謂變焦,指的是鏡頭本身可以通過調節,使焦距有較大的變化範圍(通常用焦距變化的倍數來衡量,例如4倍變焦指最大焦距是最小焦距的4倍)。這種鏡頭使用中,可以通過變焦,改變成像放大倍率(在“大場景“和”局部特寫“之間隨意轉換),適應性強,使用範圍很廣。
變焦的實現方式:變焦過程中,通過光學系統中的兩組(或更多)透鏡相對移動,改變整個系統(鏡頭)的組合焦距,且同時保證像面位置不動,使圖像放大倍率改變而且成像始終清晰。
它與單組移動式調焦不同的,單組移動式調焦意在改變成像面的位置(雖然也會引起鏡頭焦距的微小改變);而變焦意在改變鏡頭的焦距(一般都是數倍的改變),它要求穩定像面不動。
3. 自動光圈
調節鏡頭的光圈,實質上是改變了孔徑光闌的孔徑大小,從而改變了進光量,達到成像面亮度調節的目的。
這個過程,可以手動完成,也可以通過電機驅動來完成,后一種實現方式就是自動光圈調節。
4. 遠心(焦闌)鏡頭
遠心光路,一般地,可以分為物方遠心光路和像方遠心光路兩種
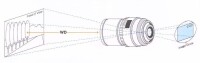
孔徑光闌位於鏡頭像方焦面上(“焦闌“因此得名),入瞳位於物方無限遠處,這樣的光路稱為物方遠心光路。這種光路的特點:物方入射主光線(紅色表示)與光軸平行。
孔徑光闌位於物方焦面上,出瞳位於像方無限遠處,這樣的光路稱為像方遠心光路。這種光路的特點是:像方出射主光線(紅色表示)與光軸平行。
這兩種光路本質上是相通的,是同一種光路(焦闌)的正向和反嚮應用。它們較多的出現在測量儀器中,結合實際的應用會表現出格子的特點,需要加以注意。物方遠心光路的成像特點是:像的大小對物距不敏感,但是對像距很敏感;而像方遠心光路的成像特點是,像的大小對物距很敏感,但是對像距不敏感。
採用這兩種遠心光路設計製作的鏡頭,分別稱作物方或者像方遠心鏡頭。

基本信息
- 中文名
- 工業鏡頭
- 外文名
- Industrial lens
- 重要性
- 是機器視覺系統設計的重要環節
- 影響
- 機器視覺系統的整體性能
- 基本功能
- 實現光束變換(調製)