共找到2條詞條名為氣動執行器的結果 展開
- 用氣壓力驅動啟閉或調節閥門的執行裝置
- 氣動執行機構
氣動執行器
用氣壓力驅動啟閉或調節閥門的執行裝置
氣動執行器是用氣壓力驅動啟閉或調節閥門的執行裝置,又被稱氣動執行機構或氣動裝置,不過一般通俗的稱之為氣動頭。
氣動執行器一般應用於發電廠、化工,煉油等,有扭矩大、空間小、扭矩曲線的有點,有時還配備一定的輔助裝置,常用的有閥門定位器和手輪機構。閥門定位器的作用是利用反饋原理來改善執行器的性能,使執行器能按控制器的控制信號,實現準確的定位。手輪機構的作用是當控制系統因停電、停氣、控制器無輸出或執行機構失靈時,利用它可以直接操縱控制閥,以維持生產的正常進行。

氣動執行器

內部結構
1、氣動裝置主要由氣缸、活塞、齒輪軸、端蓋、密封件、螺絲等組成;成套氣動裝置還應該包括開度指示、行程限位、電磁閥、定位器、氣動元件、手動機構、信號反饋等部件組成。
2、氣動裝置與閥門的連接尺寸應符合ISO5211(底部)、 GB/T12222 和 GB/T12223 的規定。
3、帶手動機構的氣動裝置,在氣源中斷時,應能用其手動機構進行氣動球閥的啟閉操作,面向手輪時,手輪或手柄應逆時針旋轉為閥開,順時針旋轉為閥關。
4、活塞桿端部為內、外螺紋時,應有標準扳手適用的扳手口。
5、活塞的密封圈應便於更換與檢修。

氣動執行器
7、帶可調緩衝機構的氣動裝置,應有缸體外部調節其緩衝作用的機構。
8、氣缸進出氣口的螺紋尺寸應符合MANUR NORM(附件標準) sypv,GB/T7306.1、GB/T7306.2 和 GB/T7307 的規定。
1、氣動裝置額定輸出力或力矩應符合 GB/T12222 和 GB/T12223 的規定
2、在空載情況下,對氣缸內輸入按《表 2》規定的氣壓,其動作應平穩,無卡阻及爬行現象。
3、在 0.6MPa 的空氣壓力下,氣動裝置啟、閉兩個方向的輸出力矩或推力,其值應不小於氣動裝置標牌所標示的數值,且動作應靈活,不允許各部位出現永久變形及其他異常現象。
4、密封試驗用最大工作壓力進行試驗時,從各自背壓一側泄漏出的空氣量不允許超過 (3+0.15D)cm3/min(標準狀態);從端蓋、輸出軸處泄漏出的空氣量不允許超過 (3+0.15d)cm3/min。
5、強度試驗用 1.5 倍的最大工作壓力進行試驗,保持試驗壓力 3min 后,其缸體端蓋和靜密封部位不允許有滲漏及結構變形。
6、動作壽命次數,氣動裝置模擬氣動閥門動作,在保持兩個方向的輸出力矩或推力能力的情況下,啟閉操作的啟閉次數應不低於 50000 次(啟—閉循環為一次)。
7、帶緩衝機構的氣動裝置,當活塞運動到行程終端位置時,不允許出現衝擊現象。
氣動執行器
1、鑄造氣缸的端蓋、端法蘭、箱體上不得有划痕、割痕、氣孔、毛刺等。
2、氣動裝置外表面塗漆層或化學處理層應平整、光滑、色澤均勻,無油污、壓痕和其他機械損傷。
氣動執行器
1、接受連續的氣信號,輸出直線位移(加電/氣轉換裝置后,也可以接受連續的電信號),有的配上搖臂后,可輸出角位移。
氣動執行器
2、有正、反作用功能。
3、移動速度大,但負載增加時速度會變慢。
4、輸出力與操作壓力有關。
5、可靠性高,但氣源中斷後閥門不能保持(加保位閥后可以保持)。
6、不便實現分段控制和程序控制。
7、檢修維護簡單,對環境的適應性好。
8、輸出功率較大。
9、具有防爆功能。
緊湊的雙活塞齒輪,齒條式結構,嚙合精確,效率高,輸出扭矩恆定。
鋁製缸體、活塞及端蓋,與同規格結構的執行器相比重量最輕。
缸體為擠壓鋁合金,並經硬質陽極氧化處理,內表面質地堅硬,強度,硬度高。採用低摩擦材料製成的滑動軸承,避免了金屬間的相互直接接觸,摩擦係數低,轉動靈活,使用壽命長。
氣動執行器與閥門安裝、連接尺寸根據國際標準ISO5211、DIN3337和VDI/VDE3845進行設計,可與普通氣動執行器互換。
氣源孔符合 NAMUR 標準。
氣動執行器底部軸裝配孔(符合ISO5211標準)成雙四方形,便於帶方桿的閥線性或45°轉角安裝。
輸出軸的頂部和頂部的孔符合 NAMUR 標準。
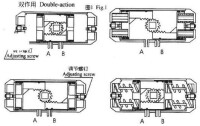
兩端的調整螺釘可調整閥門的開啟角度。
相同規格的有雙作用式、單作用式(彈簧複位)。
可根據閥門需要選擇方向,順時針或逆時針旋轉。
根據用戶需要安裝電磁閥、定位器(開度指示)、回信器、各種限位開關及手動操作裝置。
控制精度較低,雙作用的氣動執行器,斷氣源后不能回到預設位置。單作用的氣動執行器,斷氣源后可以依靠彈簧回到預設位置
氣動執行器
註:本文均以DA/SR系列氣動執行機構為例,說明執行機構的選用這個參考資料的目的是幫助客戶正確選擇執行機構,在把氣動/電動執行機構安裝到閥門之前,必須考慮以下因素。* 閥門的運行力矩加上生產廠家的推薦的安全係數/根據操作狀況。* 執行機構的氣源壓力或電源電壓。* 執行機構的類型雙作用或者單作用(彈簧複位)以及一定氣源下的輸出力矩或額定電壓下的輸出力矩。* 執行機構的轉向以及故障模式(故障開或故障關)正確選擇一個執行機構是非常重要的,如執行機構過大,閥桿可能受力過大。相反如執行機構過小,側不能產生足夠的力矩來充分操作閥門。一般地說,我們認為操作閥門所需的力矩來自閥門的金屬部件(如球芯,閥瓣)和密封件(閥座)之間的磨擦。根據閥門使用場合,使用溫度,操作頻率,管道和壓差,流動介質(潤滑、乾燥、泥漿),許多因素均影響操作力矩
球閥的結構原理基本上根據一個拋光球芯(包括通道)包夾在兩個閥座這間(上游和下游),球心的旋轉對流體進行攔截或流過球芯,上游和下游的壓差產生的力使球芯緊靠在下游閥座(浮動球結構)。這種情況下操作閥門的力矩是由球芯與閥座、閥桿與填料相互摩擦所決定的。如圖1所示,力矩最大值發生在出現壓差且球芯在關閉位置向打開方向旋轉時
蝶閥。蝶閥的結構原理基本上根據固定在軸心的蝶板。在關閉位置蝶板與閥座完全密封,當蝶板旋轉(繞著閥桿)后與流體的流向平行時,閥門處於全開位置。相反當蝶板與流體的流向垂直時,閥門處於關閉位置。操作蝶閥的力矩是由蝶板與閥座、閥桿與填料之間的磨擦所決定的,同時壓差作用在蝶板上的力也影響操作力矩如閥門在關閉時力矩最大,微小地旋轉后,力矩將明顯減小
旋塞閥的結構原理是基本根據密封在錐形塞體里的塞子。在塞子的一個方向上有一個通道。隨著塞子旋入閥座來實現閥門的開啟和關閉。操作力矩通常不受流體的壓力影響而是由開啟和關閉過程中閥座和塞子之間的摩擦所決定的。閥門在關閉時力矩最大。由於有受壓力的影響,在餘下的操作中始終保持較高的力矩
雙作用執行機構
雙作用執行機構的選用以DA系列氣動執行機構為例。齒輪條式執行機構的輸出力矩是活塞壓力(氣源壓力所供)乘上節圓半徑(力臂)所得,如圖4所示。且磨擦阻力小效率高。如圖5所示,順時針旋轉和逆時針旋轉時輸出力矩都是線性的。在正常操作條件下,雙作用執行機構的推薦安全係數為25-50%
單作用執行機構
明精單作用執行機構的選用以SR系列氣動執行機構為例在彈簧複位的應用中,輸出力矩是在兩個不同的操作過程中所得,根據行程位置,每一次操作產生兩個不同的力矩值。彈簧複位執行機構的輸出力矩由力(空氣壓力或彈簧作用力)乘上力臂所得第一種狀況:輸出力矩是由空氣壓力進入中腔壓縮彈簧后所得,稱為"空氣行程輸出力矩"在這種情況下,氣源壓力迫使活塞從0度轉向90度位置,由於彈簧壓縮產生反作用力,力矩從起點時最大值逐漸遞減直至到第二種狀況:輸出力矩是當中腔失氣時彈簧恢復力作用在活塞上所得,稱為"彈簧行程輸出力矩"在這種情況下,由於彈簧的伸長,輸出力矩從90度逐漸遞減直0度如以上所述,單作用執行機構是根據在兩種狀況下產生一個平衡力矩的基礎上設計而成的。如圖11所示。在每種情況下,通過改變每邊彈簧數量和氣源壓力的關係(如每邊2根彈簧和5.5巴氣源或反之),有可能獲得不平衡力矩 在彈簧複位應用中可獲得兩種狀況:失氣開啟或失氣關閉。在正常工作條件下,彈簧複位執行機構的推薦安全係數為25-50%
彈簧複位執行機構的選用示例(同時見技術數據表):
彈簧關(失氣)
*球閥的力矩=80NM
*安全係數(25%)=80NM+25%=100NM
*氣源壓力=0.6MPa
被選用的SY-SR執行機構是SR125-05,因為可產生下列數值:
*彈簧行程0o=119.2NM
*彈簧行程90o=216.2NM
*空氣行程0o=228.7NM
*空氣行程90o=118.8NM
從技術性能方面講,氣動執行器的優勢主要包括以下4個方面:
(1)負載大,可以適應高力矩輸出的應用。
(2)動作迅速、反應快。
(3)工作環境適應性好,特別在易燃、易爆、多塵埃、強磁、輻射和振動等惡劣工作環境中,比液壓、電子、電氣控制更優越。
(4)行程受阻或閥桿被扎住時電機容易受損。
而電動執行器的優勢主要包括:
(1)結構緊湊,體積小巧。比起氣動執行器,電動執行器結構相對簡單,一個基本的電子系統包括執行器,三位置DPDT開關、熔斷器和一些電線,易於裝配。
(2)電動執行器的驅動源很靈活,一般車載電源即可滿足需要,而氣動執行器需要氣源和壓縮驅動裝置。
(3)電動執行器沒有“漏氣”的危險,可靠性高,而空氣的可壓縮性使得氣動執行器的穩定性稍差。
(4)不需要對各種氣動管線進行安裝和維護。
(5)可以無需動力即保持負載,而氣動執行器需要持續不斷的壓力供給。
(6)由於不需要額外的壓力裝置,電動執行器更加安靜。通常,如果氣動執行器在大負載的情況下,要加裝消音器。
(7)在氣動裝置中的通常需要把電信號轉化為氣信號,然後再轉化為電信號,傳遞速度較慢,不宜用於元件級數過多的複雜迴路。
(8)電動執行器在控制的精度方面更勝一籌。
實際上,氣動系統和電動系統並不互相排斥。氣動執行器可以簡單的實現快速直線循環運動,結構簡單,維護便捷,同時可以在各種惡劣工作環境中使用,如有防爆要求、多粉塵或潮濕的工況。但在作用力快速增大且需要精確定位的情況下,帶伺服馬達的電驅動器具有優勢。對於要求精確、同步運轉、可調節和規定的定位編程的應用場合,電驅動器是最好的選擇,帶閉環定位控制器的伺服或步進馬達所組成的電驅動系統能夠補充氣動系統的不足之處。
現代控制中各種系統越來越複雜、越來越精細,並不是某種驅動控制技術就可滿足系統的多種控制功能。電動執行器主要用於需要精密控制的應用場合,自動化設備中柔性化要求在不斷提升,同一設備往往要求適應不同尺寸工件的加工需要,執行器需要進行多點定位控制,而且要對執行器的運行速度及力矩進行精確控制或同步跟蹤,這些利用傳統氣動控制是無法實現的,而電動執行器就能非常輕鬆的實現此類控制。由此可見氣動執行器比較適用於簡單的運動控制,而電執行器則多用於精密運動控制的場合。
