A*演演算法
A*演演算法
A*演演算法,A*(A-Star)演演算法是一種靜態路網中求解最短路徑最有效的直接搜索方法,也是解決許多搜索問題的有效演演算法。演演算法中的距離估算值與實際值越接近,最終搜索速度越快。
A*(A-Star)演演算法是一種靜態路網中求解最短路徑最有效的直接搜索方法,也是許多其他問題的常用啟髮式演演算法。注意——是最有效的直接搜索演演算法,之後湧現了很多預處理演演算法(如ALT,CH,HL等等),在線查詢效率是A*演演算法的數千甚至上萬倍。
公式表示為:f(n)=g(n)+h(n),
其中,f(n)是從初始狀態經由狀態n到目標狀態的代價估計,
g(n)是在狀態空間中從初始狀態到狀態n的實際代價,
h(n)是從狀態n到目標狀態的最佳路徑的估計代價。
(對於路徑搜索問題,狀態就是圖中的節點,代價就是距離)
h(n)的選取
保證找到最短路徑(最優解的)條件,關鍵在於估價函數f(n)的選取(或者說h(n)的選取)。
人們以d(n)表達狀態n到目標狀態的距離,那麼h(n)的選取大致有如下三種情況:
1.如果h(n)
2.如果h(n)=d(n),即距離估計h(n)等於最短距離,那麼搜索將嚴格沿著最短路徑進行,此時的搜索效率是最高的。
3.如果h(n)>d(n),搜索的點數少,搜索範圍小,效率高,但不能保證得到最優解。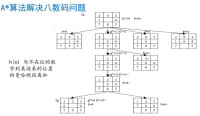
A*演演算法
參見參考資料中的“A*演演算法入門”。
另外,A*同樣可以用於其他搜索問題,只需要對應狀態和狀態的距離即可。
該演演算法在最短路徑搜索演演算法中分類為:
直接搜索演演算法:直接在實際地圖上進行搜索,不經過任何預處理;
啟髮式演演算法:通過啟發函數引導演演算法的搜索方向;
靜態圖搜索演演算法:被搜索的圖的權值不隨時間變化(后被證明同樣可以適用於動態圖的搜索)。
距離估計與實際值越接近,估價函數取得就越好
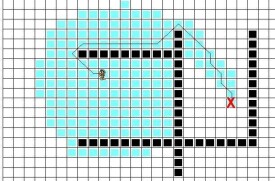
例如對於幾何路網來說,可以取兩節點間曼哈頓距離做為距離估計,即f=g(n)+(abs(dx-nx)+abs(dy-ny));這樣估價函數f(n)在g(n)一定的情況下,會或多或少的受距離估計值h(n)的制約,節點距目標點近,h值小,f值相對就小,能保證最短路的搜索向終點的方向進行。明顯優於Dijkstra演演算法的毫無方向的向四周搜索。
演演算法實現(路徑搜索)
創建兩個表,OPEN表保存所有已生成而未考察的節點,CLOSED表中記錄已訪問過的節點。
算起點的h(s);
將起點放入OPEN表;
保存路徑,即從終點開始,每個節點沿著父節點移動直至起點,這就是你的路徑;
用C語言實現A*最短路徑搜索演演算法,作者Tittup frog(跳跳蛙)。
啟髮式搜索其實有很多的演演算法
比如:局部擇優搜索法、最好優先搜索法等等,當然A*也是。這些演演算法都使用了啟發函數,但在具體的選取最佳搜索節點時的策略不同。像局部擇優搜索法,就是在搜索的過程中選取“最佳節點”后捨棄其他的兄弟節點、父親節點,而一直得搜索下去。這種搜索的結果很明顯,由於捨棄了其他的節點,可能也把最好的節點都捨棄了,因為求解的最佳節點只是在該階段的最佳並不一定是全局的最佳。最好優先就聰明多了,它在搜索時,並沒有捨棄節點(除非該節點是死節點),在每一步的估價中都把當前的節點和以前的節點的f(n)比較得到一個“最佳的節點”,這樣可以有效的防止“最佳節點”的丟失。那麼A*演演算法又是一種什麼樣的演演算法呢?
其實A*演演算法也是一種最好優先的演演算法
只不過要加上一些約束條件罷了。由於在一些問題求解時,人們希望能夠求解出狀態空間搜索的最短路徑,也就是用最快的方法求解問題,A*就是幹這種事情的!
人們先下個定義,如果一個估價函數可以找出最短的路徑,人們稱之為可採納性。A*演演算法是一個可採納的最好優先演演算法。A*演演算法的估價函數可表示為:
f'(n)=g'(n)+h'(n)
這裡,f'(n)是估價函數,g'(n)是起點到節點n的最短路徑值,h'(n)是n到目標的最短路經的啟發值。由於這個f'(n)其實是無法預先知道的,所以人們用前面的估價函數f(n)做近似。g(n)代替g'(n),但g(n)>=g'(n)才可(大多數情況下都是滿足的,可以不用考慮),h(n)代替h'(n),但h(n)<=h'(n)才可(這一點特別的重要)。可以證明應用這樣的估價函數是可以找到最短路徑的,也就是可採納的。人們說應用這種估價函數的最好優先演演算法就是A*演演算法。
舉一個例子,其實廣度優先演演算法就是A*演演算法的特例。其中g(n)是節點所在的層數,h(n)=0,這種h(n)肯定小於h'(n),所以由前述可知廣度優先演演算法是一種可採納的。實際也是。當然它是一種最臭的A*演演算法。
再說一個問題,就是有關h(n)啟發函數的信息性。h(n)的信息性通俗點說其實就是在估計一個節點的值時的約束條件,如果信息越多或約束條件越多則排除的節點就越多,估價函數越好或說這個演演算法越好。這就是為什麼廣度優先演演算法的不甚為好的原因了,因為它的h(n)=0,沒有一點啟發信息。但在遊戲開發中由於實時性的問題,h(n)的信息越多,它的計算量就越大,耗費的時間就越多。就應該適當的減小h(n)的信息,即減小約束條件。但演演算法的準確性就差了,這裡就有一個平衡的問題。
基本信息
- 中文名
- A*演算法
- 外文名
- A-star algorithm
- 別名
- 啟髮式搜索
- 表達式
- f(n)=g(n)+h(n)
- 運行條件
- 靜態網路
- 原理
- 距離估算值與實際值越接近程度
目錄