同步測距全球定位系統
同步測距全球定位系統
一種衛星導航系統。簡稱全球定位系統(GPS)。美國於1973年開始研究全球定位系統,用以滿足軍事上的需要。原計劃在3個軌道平面上共部署24顆衛星,在最佳狀態下可達到10米左右三維準確度(全球範圍) ,後來改為在6個軌道平面上共部署18顆衛星,定位能力有所降低。
一種正在趨於成熟的先進軍用衛星導航定位系統,簡稱全球定位系統 (GPS)。60年代“子午儀”衛星導航系統研製成功以後,美國繼續研究更先進的軍用衛星導航系統。1973年開始研究全球定位系統,工程研究試製階段接近結束,預計80年代後期開始部署使用,用以滿足軍事上的需要。原計劃在3個軌道平面上共部署 24顆衛星,在最佳狀態下可達到10米左右三維準確度(全球範圍)。後來改為在6個軌道平面上共部署18顆衛星,定位能力有所降低。
全球定位系統包括地面控制部分、空間部分和用戶部分。
同步測距全球定位系統
同步測距全球定位系統
同步測距全球定位系統
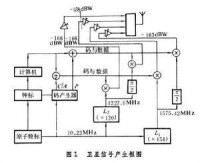
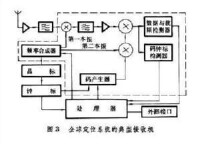
接收機的功能是:首先由處理器確定4顆待用的位置最佳的衛星,其次從頻率合成器中選用L1和L2,再用碼跟蹤環與收到P碼或C/A碼保持同步,同時用鎖相環跟蹤載頻(圖3)。然後準確測量信號到達時間和多普勒頻移。可用幾個跟蹤環連續測量各顆衛星,或用一個環順序反覆測量各顆衛星。隨後對導航電文解調,從副框架集成完整電文,並通過制入奇偶校驗比特進行校正。衛星星曆經解碼後計算衛星的位置和速度,然後將衛星位置、速度、信號到達時間與多普勒頻移合起來算出用戶位置、速度,以及與用戶鐘的時間差和頻差。解算3個位置坐標須用4顆衛星信號的到達時間和接收機鐘差。接收機可與其他導航感測器組合。由於用戶對功能要求不同,在設計上有較大的變動範圍。高性能飛機要求在強幹擾環境中保持高定位準確度,需要使用4個通道同時跟蹤4顆衛星。航海和航空的民用用戶使用單通道接收機,並只用C/A碼順次測量就能滿足需要。
全球定位系統與推算系統組合工作,如與慣性導航系統組合最為有利,兩者可以互相補充。慣性導航在載體短期運動急劇變化時仍能提供準確信息。慣性導航的速度輸出又可支持全球定位系統接收機的碼跟蹤和載頻跟蹤環,可使接收機使用很窄的跟蹤環帶寬。這樣,在低信噪比條件下仍可連續工作和對抗強的干擾。另一方面,全球定位系統在平穩運動條件和良好信噪比環境中提供的位置、速度、偽距和距離變化率,又有助於調整和修正慣性導航數據。慣性導航在長期漂移中所產生的誤差,通常可用全球定位系統測得的數據不斷估算和更新。
組合系統導航濾波器既可裝入全球定位系統接收機的處理器中,也可裝入慣性導航的處理器中。所有導航計算均可在一個處理器中進行。但用多個濾波器分散處理多個感測器的輸入時,載體上各個導航系統都能單獨工作。
基本信息
- 中文名
- 同步測距全球定位系統