捷聯慣導系統
導航系統
捷聯慣導系統(SINS)是在平台式慣導系統基礎上發展而來的,它是一種無框架系統,由三個速率陀螺、三個線加速度計和微型計算機組成。捷聯慣導系統和平台式慣導系統一樣,能精確地提供載體的姿態、地速、經緯度等導航參數。採用光纖陀螺的捷聯慣導系統被認為是一種極有發展前途的導航系統。
在軍、民領域中的各類飛行器上,慣導系統作為一種現代化導航設備已被廣泛應用,尤其在現代軍事航空領域中發揮著舉足輕重的作用。
早期的慣導系統由於採用了機械式精密穩定平台,被稱為平台式慣導系統,它不僅體積大、重量重、可靠性低、維護複雜、費用昂貴,而且系統性能還受到機械結構的複雜性和極限精度的制約。最早的機械式慣導系統是美國麻省理工學院研製的於1953年投於使用的空間穩定慣性基準設備,其直徑為1.5m,重量達908kg,系統精度約為0.925km/h。到20世紀70年代,美空軍採用了高級慣性基準球用於MX洲際彈道導彈上,將系統的精度提高了一個數量級以上。它代表了機械實現的頂峰,該系統採用了浮球平台結構,直徑為0.5m,重量為52kg。
隨著計算機和微技術的迅猛發展,利用計算機的強大解算和控制功能代替機電穩定系統成為可能。於是,一種新型慣導系統--捷聯慣導系統從20世紀60年代初開始發展起來,尤其在1969年,捷聯慣導系統作為"阿波羅"-13號登月飛船的應急備份裝置,在其服務艙發生爆炸時將飛船成功地引導到返回地球的軌道上時起到了決定性作用,成為捷聯式慣導系統發展中的一個里程碑。
慣導系統主要分為平台式慣導系統和捷聯式慣導系統兩大類。慣導系統(INS)是一種不依賴於任何外部信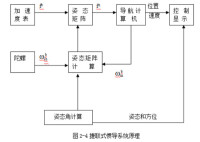 息、也不向外部輻射能量的自主式導航系統,具有隱蔽性好,可在空中、地面、水下等各種複雜環境下工作的特點。
息、也不向外部輻射能量的自主式導航系統,具有隱蔽性好,可在空中、地面、水下等各種複雜環境下工作的特點。
捷聯慣導系統
平台式慣導系統和捷聯式慣導系統的主要區別是:前者有實體的物理平台,陀螺和加速度計置於陀螺穩定的平台上,該平台跟蹤導航坐標系,以實現速度和位置解算,姿態數據直接取自於平台的環架;後者的陀螺和加速度計直接固連在載體上作為測量基準,它不再採用機電平台,慣性平台的功能由計算機完成,即在計算機內建立一個數學平台取代機電平台的功能,其飛行器姿態數據通過計算機計算得到,故有時也稱其為"數學平台",這是捷聯慣導系統區別於平台式慣導系統的根本點。由於慣性元有固定漂移率,會造成導航誤差,因此,遠程導彈、飛機等武器平台通常採用指令、GPS或其組合等方式對慣導進行定時修正,以獲取持續準確的位置參數。如採用指令+捷聯式慣導、GPS+慣導(GPS/INS)。美國的戰斧巡航導彈採用了GPS+INS+地形匹配組合導航。
慣導系統基本工作原理是以牛頓力學定律為基礎,通過測量載體在慣性參考系的加速度,將它對時間進行積分,之後將其變換到導航坐標系,得到在導航坐標系中的速度、偏航角和位置信息等。對捷聯慣導系統而言,平台的作用和概念體現在計算機中,它是寫在計算機中的方向餘弦陣。直接安裝在載體上的慣性元件測得相對慣性空間的加速度和角加速度是沿載體軸的分量,將這些分量經過一個坐標轉換方向餘弦陣,可以轉換到要求的計算機坐標系內的分量。如果這個矩陣可以描述載體和地理坐標系之間的關係,那麼載體坐標系測得的相對慣性空間的加速度和角速度,經過轉換后便可得到沿地理坐標系的加速度和角速度分量,有了已知方位的加速度和角速度分量之後,導航計算機便可根據相應的力學方程解出要求的導航和姿態參數來。
捷聯慣導系統和平台式慣導系統一樣,能精確提供載體的姿態、地速、經緯度等導航參數。但平台式慣導系統結構較複雜、可靠性較低、故障間隔時間較短、造價較高,為可靠起見,通常在一個運載體上要配用兩套慣導裝置,這就增加了維修和購置費用。在捷聯慣導系統中,由於計算機中存儲的方向餘弦解析參考系取代了平台系統以物理形式實現的參考系,因此,捷聯慣導系統有以下獨特優點。
(1)去掉了複雜的平台機械系統,系統結構極為簡單,減小了系統的體積和重量,同時降低了成本,簡化了維修,提高了可靠性。
(2)無常用的機械平台,縮短了整個系統的啟動準備時間,也消除了與平台系統有關的誤差。
(3)無框架鎖定系統,允許全方位(全姿態)工作。
(4)除能提供平台式系統所能提供的所有參數外,還可以提供沿彈體三個軸的速度和加速度信息。
但是,由於在捷聯慣導系統中,慣性元件與載體直接固連,其工作環境惡劣,對慣性元件及機(彈)載計算機等部件也提出了較高的要求。
(1)要求加速度表在寬動態範圍內具有高性能、高可靠性,且能數字輸出。
(2)因為要保證大攻角下的計算精度,對計算機的速度和容量都提出了較高的要求。
進入20世紀80~90年代,在太空梭、宇宙飛船、衛星等民用領域及在各種戰略、戰術導彈、軍用飛機、反潛武器、作戰艦艇等軍事領域開始採用動力調諧式陀螺、激光陀螺和光纖式陀螺的捷聯慣導系統,尤其是激光陀螺和光纖式陀螺是捷聯慣導系統的理想器件。激光陀螺具有角速率動態範圍寬、對加速度和震動不敏感、不需溫控、啟動時間特別短和可靠性高等優點。激光陀螺慣導系統已在波音757/767、A310民機以及F-20戰鬥機上試用,精度達到1.85km/h的量級。20世紀90年代,激光陀螺慣導系統估計佔到全部慣導系統的一半以上,其價格與普通慣導系統差不多,但由於增加了平均故障間隔時間,因而其壽命期費用只有普通慣導系統的15%~20%。光纖陀螺實際上是激光陀螺中的一種,其原理與環型激光陀螺相同,克服了因激光陀螺閉鎖帶來的負效應,具有檢測靈敏度和解析度極高(可達10-7rad/s)、啟動時間極短(原理上可瞬間啟動)、動態範圍極寬、結構簡單、零部件少體積小、造價低、可靠性高等優點。採用光纖陀螺的捷聯航姿系統已用於戰鬥機的機載武器系統中及波音777飛機上。波音777由於採用了光纖陀螺的捷聯慣導系統,其平均故障間隔時間可高達20000h。採用光纖陀螺的捷聯慣導系統被認為是一種極有發展前途的導航系統。
捷聯慣導系統
儘管捷聯慣導系統不能避免慣性器件的固有缺點,但由於它具有諸多優點,因此,目前捷聯慣導系統在各類民用的航天飛行器、運載火箭、客/貨機及軍事領域的各類軍用飛機、戰術導彈等武器系統上都已被廣泛採用。隨著航空航天技術的發展及新型慣性器件的關鍵技術的陸續突破進而被大量應用,捷聯慣導系統的可靠性、精度將會更高,成本將更低,同時,隨著機(彈)載計算機容量和處理速度的提高,許多慣性器件的誤差技術也可走向實用,它可進一步提高捷聯慣導系統的精度。此外,隨著以繞飛行體軸旋轉角增量為輸出的新型高精度捷聯式陀螺的出現,用以描述剛體姿態運動的數學方法也有了新的發展,將以經典的歐拉角表示法向四元素表示法發展。
不管慣性器件的精度多高,由於陀螺漂移和加速度計的誤差隨時間逐漸積累(這也是純慣導系統的主要誤差源之一,它對位置誤差增長的影響是時間的三次方函數),慣導系統長時間運行必將導致客觀的積累誤差,因此,目前人們在不斷探索提高自主式慣導系統的精度外,還在尋求引入外部信息,形成組合式導航系統,這是彌補慣導系統不足的一個重要措施。
組合導航系統通常以慣導系統作為主導航系統,而將其他導航定位誤差不隨時間積累的導航系統如無線電導航、天文導航、地形匹配導航、GPS等作為輔助導航系統,應用卡爾曼濾波技術,將輔助信息作為觀測量,對組合系統的狀態變數進行最優估計,以獲得高精度的導航信號。這樣,既保持了純慣導系統的自主性,又防止了導航定位誤差隨時間積累。組合導航系統不僅在民用上而且在軍事上均具有重要意義。
捷聯慣導系統
隨著GPS的普及,SINS/GPS組合導航系統顯示出巨大的發展潛力。該組合導航系統由GPS提供三維位置、三維速度和精確的時間信息,系統的核心是卡爾曼濾波器,它是在線性最小方差下的最優估計。美國海軍在海灣戰爭發射的"斯拉姆"導彈的慣導系統採用了GPS技術,其命中精度達10~15m之內;美國於20世紀80年代研製的已在"三叉戟"核潛艇上部署的射程達11110km的"三叉戟2"D-5戰略導彈,採用了CNS/INS(天文導航系統/慣性導航系統)組合導航系統,其導彈落點圓周概率(CEP)小於185m。
目前,捷聯慣導系統已在軍民領域被廣泛應用,本文僅介紹其在部分飛航式導彈/炸彈上的應用(見表1)。對於飛航式戰術地地導彈,由於其全程均在稠密大氣層內飛行,且射程遠,飛行時間長,容易受到大氣干擾的影響,因此,採用捷聯慣導系統是唯一可選的制導方式;對於中遠程的空空導彈,因導彈的發射距離遠,具有攻擊多目標的能力,捷聯慣導系統也是比較理想的中制導方式;中遠程地空導彈的制導方式一般為初始制導+中制導+末制導,其中中制導一般採用具有捷聯慣導系統的組合導航系統;各類反艦導彈採用捷聯慣導系統也可簡化降低成本,提高性能價格比。
基本信息
- 中文名
- 捷聯慣導系統
- 外文名
- Strapdown inertial navigation system
- 特點
- 體積小、重量輕、可靠性高等
- 應用
- 導彈/炸彈制導
- 型號
- 美國戰斧巡航導彈
- 英文簡稱
- SINS
- 投入時間
- 1953年