主動懸架
直接力發生器的動作器
如果懸架系統的剛度和阻尼特性能根據汽車的行駛條件(車輛的運動狀態和路面狀況等)進行動態自適應調節,使懸架系統始終處於最佳減振狀態,則稱為主動懸架。主動懸架具有諸多優點,比如可以控制車身高度,提高通過性,兼顧汽車的平順性與操縱穩定性等。
主動懸架具有非常誘人的優點,比如:主動懸架可以兼顧汽車的平順性與操縱穩定性,而在傳統的被動懸架設計中,平順性與操縱穩定性往往難以兼顧,一般只能採取折中的辦法;當承載質量發生變化或道路條件發生變化時,主動懸架可以調整自身參數,使車身的離地高度保持在合理的數值上,從而提高汽車的操縱穩定性、平順性和通過性;主動懸架可以調節懸架的參數,從而降低車輪載荷波動,提高附著性能,改善操縱性,同時減輕了輪胎的磨損。
但是主動懸架也有一些缺點,主要是:結構和控制複雜,全主動懸架的硬體要求高、耗能大、成本高,其他幾類主動懸架也會增加整車重量和成本。
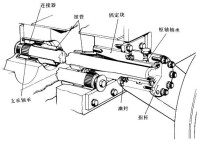
以油氣彈簧為彈性元件的主動懸架
全主動懸架
全主動懸架又稱為寬頻主動懸架,是根據汽車的運動和路面狀況,適時地調節懸架的剛度和阻尼,使其處於最佳減振狀態。全主動懸架可以在車身振動的全頻段範圍內兼顧汽車的平順性與操縱穩定性;能夠實時地控制車身高度,改善通過性;能夠降低車輪載荷波動,提高附著性能,改善操縱性,同時減輕了輪胎的磨損。但是全主動懸架的缺點是結構和控制複雜,硬體要求高、耗能大、成本高,這些缺點限制了全主動懸架在汽車上的推廣應用。
慢主動懸架
慢主動懸架又稱為有限帶寬主動懸架,其作動器僅在一窄帶頻率範圍內工作,所以它降低了系統的成本及複雜程度,比全主動懸架便宜。儘管如此,它的主動控制仍然覆蓋了主要的車身振動,包括縱向、俯仰、側傾以及轉向控制等要求的頻率範圍,改善了車身共振頻率附近的行駛性能,提高了對車身姿態的控制,性能可達到與全主動系統很接近的程度。
半主動懸架
半主動懸架是指懸架彈性元件的剛度和減振器的阻尼係數之一可以根據需要進行調節控制的懸架。由於彈簧剛度調節相對較難,所以一般的半主動懸架不考慮改變懸架的剛度,而只考慮改變懸架的阻尼。半主動懸架按阻尼級又可分成有級式和無級式兩種。半主動懸架是由無動力源且只有可控的阻尼元件組成。由於半主動懸架結構簡單,工作時幾乎不消耗車輛動力,而且還能獲得與全主動懸架耗近的性能,故有較好的應用前景。
饋能型主動懸架
饋能型主動懸架是一種集饋能和減振功能於一體的主動懸架。這種懸架帶有能量回收裝置,可以將懸架間被減振器所消耗的振動能量轉化為可供汽車其他耗能部件使用的能量,同時保持汽車良好的行駛平順性。饋能型懸架在實現途徑上分為機械式饋能和電磁式饋能兩種。饋能型主動懸架最重要的特徵在於,可以將汽車振動的能量收集並轉化成其他部件可以使用的能量,有利於汽車的節能,非常符合當下對汽車節能環保的時代要求。
全主動懸架
汽車慢主動懸架模型
是以油氣彈簧為彈性元件的主動懸架,4個車輪上的油氣彈簧通過油路相連形成全封閉式環路控制系統。它將車身或車輪的振動量經感測器變換成一種信息傳給控制閥,使控制閥調整彈性元件的高度和剛度,以達到調節車身高度、保證良好行駛平順性的目的。當車身發生傾斜時,布置在前、后軸上的四個控制閥控制油路系統,保持車身高度不變,使汽車具有抗側傾、抗縱傾的作用。
慢主動懸架
慢主動懸架的結構是普通彈簧和執行器串聯,再和被動阻尼器並聯,如圖3所示。慢主動懸架執行器在帶寬為3~6Hz的頻率範圍內工作,高於這個頻率,懸架就恢復成被動懸架。與全主動懸架相比,降低了成本及複雜程度,減少了能耗,且主動控制仍覆蓋主要的車身振動,並能衰減車身共振頻率附近的振動。
半主動懸架
有級式半主動懸架將阻尼分成兩級、三級或更多級,可由駕駛員選擇或根據感測器信號自動進行選擇所需要的阻尼級。圖4所示的是裝在半主動懸架中的三級阻尼可調減振器的旁路控制閥。它是由調節電動機l帶動閥心2轉動,使控制閥孔3具有關閉、小開和大開三個位置,產生三個阻尼值。該減振器應用於Opel Senator和Opel Omega轎車上。
圖5是一種無級式半主動懸架示意圖,微處理3從速度、位移、加速度等感測器處接收信號,計算出系統相應的阻尼值,併發出控制指令到步進電動機2,經閥桿4調節閥門5,使其改變節流孔1的通道截面積,從而改變系統的阻尼。
饋能型主動懸架
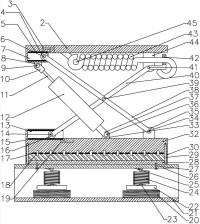
無級式半主動懸架示意圖
機械式饋能的原理是通過適當的機械傳動結構(如再生泵裝置、機械式可變線性傳動裝置)將車輪和車身的振動能量傳遞給液壓或氣壓儲能裝置,以液壓能或氣壓能的形式進行存儲,在適當的時候釋放儲能,用以抑制振動,減小能耗。圖6所示的是一種利用液壓儲能裝置的機械式饋能主動懸架。
圖6中的小功率液壓增壓包被用來克服單向閥的開啟壓力和提高饋能液壓缸的進油效率,從而消除液壓油的可壓縮性對饋能阻尼力凡產生不確定性的影響。
以上腔饋能為例,饋能型懸架中的關鍵部件——饋能裝置回收能量的實現包括兩個過程:(1)進油過程:當懸架處於舒張過程中時,液壓油在增壓包的作用下從液壓油箱經過經單向閥1和相關油管進入到饋能液壓缸的上腔,完成進油過程。(2)饋能過程:當懸架處於壓縮過程中時,饋能液壓缸中的活塞相對於簧載質量有向上運動的趨勢,使得上腔中產生一定的壓力,當此壓力能使單向閥2與5開啟時,該壓力油經過單向閥2與5及相關油管進入到液壓蓄能器完成饋能過程;同時饋能裝置向簧載質量提供饋能阻尼力Ff,蓄能器中積蓄的液壓能就可以供汽車上如液壓動力轉向器等液壓耗能部件使用。下腔饋能的工作原理與上腔饋能的工作原理相同。
電磁式饋能的原理是用電磁作動器替代傳統的減振器,當車輪和車身相對運動時,電機的線圈切割磁力線,向外輸出電壓,將機械振動能量轉化為電能,存儲到儲能裝置。從本質上來講,相當於簧載質量與非簧載質量上分別固定線圈與磁場,兩部分用機械傳動機構相連。此處的連接方案選擇有很多種,比如採用直線電動機,或用齒輪齒條機構連接轉動電動機等。
主動懸架的控制技術
主動懸架主要包含執行機構和控制策略兩大部分。由於執行機構完全按照控制策略的要求來輸出主動力,因此主動懸架設計的關鍵,就是選取能夠為車輛提供良好性能的控制策略。不同的控制策略,將會導致不同的懸架特性和減振效果。下面簡要介紹一些常見的主動懸架控制策略及其優缺點。
最優控制
上世紀60年代,線性最優控制理論已被應用於車輛懸架系統的研究中。線性二次型調節器控制理論(簡稱 LQR)和線性二次高斯型控制理論(簡稱LQG)是主動懸架設計人員常用的方法。理論上講,LQR和LQG主動懸架大幅度地改善了車輛的性能,且具有較大的穩定裕量。但主動懸架對模型攝動時基本不具備魯棒性,在激勵頻率大於60Hz時,系統極易變得不穩定。因此線性最優控制具有以下不足之處:①採用線性最優控制理論來設計主動懸架時,需要有一個明確的目標函數;②最優控制理論很難處理好頻域內的減振問題,難以使車輛兼具良好的時域和頻域性能;③沒有考慮模型的不確定性,只是在平均意義上對隨機白雜訊擾動進行了抑制。因此當模型存在攝動時,線性最優控制基本不具有魯棒性。
預瞄控制
主動懸架的預瞄控制能夠根據車輛目前的行駛狀態和未來干擾等因素來提前給出調節作用,使懸架系統最有效地抵消外部干擾所引起的振動。預瞄控制的實現方法有兩類,一類是將前輪懸架的狀態信息反饋給後輪懸架,另一類是通過測量車輪前方道路來獲得實時的路況信息,並將此信息作為主動懸架設計的重要依據。預瞄控制的不足之處主要有:①預瞄控制是在假定懸架系統是線性時不變系統的情況下制定的,並沒有對車輛參數的時變性加以研究;②預瞄控制要求車輛裝備特製的預瞄感測器,雖然在技術上是可行的,但考慮到實車的製造成本、車輛工作環境對感測器使用壽命的影響等實際問題,要將預瞄控制應用於實際還有很多問題有待解決。
自適應控制
自適應控制是一種實時調節控制器的方法,其研究對象是具有一定不確定性的系統。這裡所謂的“不確定性”是指描述被控對象及其環境的數學模型不是完全確定的,其中包含一些未知因素和隨機因素。在懸架控制系統的設計中,自適應控制能自動監測系統參數的變化,並實時地調節控制策略,從而使系統具有良好的性能。目前,比較完善的自適應理論有模型參考自適應控制和自校正控制。前者可對控制器的參數進行直接更新,而後者是採用參數估計的方式間接地對控制器進行更新。但是自適應控制僅適合於懸架參數在某一特定範圍內緩慢變化的情況。當系統參數的變化超出特定的範圍時,系統的控制效果將會變差。
由人作為控制器的控制系統是典型的智能控制系統,其中包含了人的高級智能活動。模糊控制在一定程度上模仿了人的控制,其控制特點是:①不需要準確的數學模型;②將大量的控制經驗和知識作為控制的主要依據。考慮到懸架系統本身的非線性和所處環境的複雜性等因素,懸架系統可採用模糊控制策略來獲得滿意的控制效果。然而模糊控制規則的完整性、模糊子集的定義、隸屬度函數的確定、模糊推理機制等因素都會對模糊控制器的性能產生影響,而這些因素大都依賴於專家的經驗。而在很多情況下,專家經驗並不完備,有時是相互矛盾的,甚至根本沒有專家的經驗可以利用,這大大增加了模糊控制器設計的難度。為了使模糊控制器具有良好的自適應性和魯棒性,許多專家致力於模糊控制器自動設計的研究。
神經網路控制
人工神經網路是在現代生物學研究人腦組織所取得成果的基礎上,將大量簡單的處理單元廣泛連結組成的複雜網路,可用來模擬人的直觀性思維模式。神經網路控制系統作為一個新興的領域,已經引起了控制界的興趣,許多學者將其應用在了主動懸架控制中。學習是神經網路研究的一個重要內容,它的適應性是通過學習實現的。然而神經網路學習速度較慢,不適合應用在實時控制中;此外,如何獲取神經網路的訓練樣本和改進訓練策略等問題還有待於進一步研究和解決。
在上述控制方法外,還有一些其它的方法,比如滑模控制、免疫進化控制等。無論採用何種控制方法,車輛的性能均有不同程度的改善。在研究和開發中,結合實際車輛的工況,設計簡單有效、實用的控制方法是車輛主動懸架研究工作的主要目標。

基本信息
- 中文名
- 主動懸架
- 類型
- 直接力發生器的動作器
- 組成
- 四部分
- 核心
- 懸架阻尼系統