舵機
船舶上的一種大甲板機械
舵機是一種位置(角度)伺服的驅動器,適用於那些需要角度不斷變化並可以保持的控制系統。舵機是船舶上的一種大甲板機械。
舵機的大小由外舾裝按照船級社的規範決定,選型時主要考慮扭矩大小。如何審慎地選擇經濟且合乎需求的舵機,也是一門不可輕忽的學問。
舵機是一種位置(角度)伺服的驅動器,適用於那些需要角度不斷變化並可以保持的控制系統。目前,在高檔遙控玩具,如飛機、潛艇模型,遙控機器人中已經得到了普遍應用。
舵機是船舶上的一種大甲板機械。舵機的大小由外舾裝按照船級社的規範決定,選型時主要考慮扭矩大小。
在航天方面,舵機應用廣泛。航天方面,導彈姿態變換的俯仰、偏航、滾轉運動都是靠舵機相互配合完成的。舵機在許多工程上都有應用,不僅限於船舶。
船用舵機目前多用電液式,即液壓設備由電動設備進行遙控操作。有兩種類型:一種是往複柱塞式舵機,其原理是通過高低壓油的轉換而做功產生直線運動,並通過舵柄轉換成旋轉運動。另一種是轉葉式舵機,其原理是高低壓油直接作用於轉子,體積小而高效,但成本較高。
這兩類舵機的差別:往複柱塞式舵機以上舵承來承重舵系,下舵承來定位,舵柄的壓入量僅幾毫米;而轉葉式舵機不需要上舵承,由舵機直接承重,但是在舵機平台需要考慮水密性,舵柄的壓入量需幾十毫米。往複柱塞式舵機對尺寸的要求較大。往複柱塞式舵機可以向一舷偏轉不到40°,轉葉式舵機可達70°。液壓系統作用是高、低壓轉換,將壓力損失轉化為機械運動。包括1.高壓泵組(提供壓力油)2.控制、操作設備3.執行機構(油馬達,油缸柱塞等)。
舵機是遙控航空、航天模型控制動作,改變方向的重要組成,不同類型的遙控模型所需的舵機種類也隨之不同。如何審慎地選擇經濟且合乎需求的舵機,也是一門不可輕忽的學問。
舵機主要適用於那些需要角度不斷變化並可以保持的控制系統,比如人形機器人的手臂和腿,車模和航模的方向控制。舵機的控制信號實際上是一個脈衝寬度調製信號( PWM信號),該信號可由FP-GA器件、模擬電路或單片機產生。
舵機主要是由外殼、電路板、驅動馬達、減速器與位置檢測元件所構成。其工作原理是由接收機發出訊號給舵機,經由電路板上的 IC驅動無核心馬達開始轉動,透過減速齒輪將動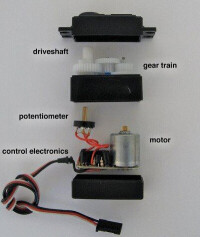 力傳至擺臂,同時由位置檢測器送回訊號,判斷是否已經到達定位。位置檢測器其實就是可變電阻,當舵機轉動時電阻值也會隨之改變,藉由檢測電阻值便可知轉動的角度。一般的伺服馬達是將細銅線纏繞在三極轉子上,當電流流經線圈時便會產生磁場,與轉子外圍的磁鐵產生排斥作用,進而產生轉動的作用力。依據物理學原理,物體的轉動慣量與質量成正比,因此要轉動質量愈大的物體,所需的作用力也愈大。舵機為求轉速快、耗電小,於是將細銅線纏繞成極薄的中空圓柱體,形成一個重量極輕的無極中空轉子,並將磁鐵置於圓柱體內,這就是空心杯馬達。
力傳至擺臂,同時由位置檢測器送回訊號,判斷是否已經到達定位。位置檢測器其實就是可變電阻,當舵機轉動時電阻值也會隨之改變,藉由檢測電阻值便可知轉動的角度。一般的伺服馬達是將細銅線纏繞在三極轉子上,當電流流經線圈時便會產生磁場,與轉子外圍的磁鐵產生排斥作用,進而產生轉動的作用力。依據物理學原理,物體的轉動慣量與質量成正比,因此要轉動質量愈大的物體,所需的作用力也愈大。舵機為求轉速快、耗電小,於是將細銅線纏繞成極薄的中空圓柱體,形成一個重量極輕的無極中空轉子,並將磁鐵置於圓柱體內,這就是空心杯馬達。
舵機
為了適合不同的工作環境,有防水及防塵設計的舵機;並且因應不同的負載需求,舵機的齒輪有塑膠及金屬之區分,金屬齒輪的舵機一般皆為大扭力及高速型,具有齒輪不會因負載過大而崩牙的優點。較高級的舵機會裝置滾珠軸承,使得轉動時能更輕快精準。滾珠軸承有一顆及二顆的區別,當然是二顆的比較好。目前新推出的 FET 舵機,主要是採用 FET(Field Effect Transistor)場效電晶體。FET 具有內阻低的優點,因此電流損耗比一般電晶體少。
廠商所提供的舵機規格資料,都會包含外形尺寸(mm)、扭力(kg/cm)、速度(秒/60°)、測試電壓(V)及重量(g)等基本資料。扭力的單位是 kg/cm,意思是在擺臂長度 1 公分處,能吊起幾公斤重的物體。這就是力臂的觀念,因此擺臂長度愈長,則扭力愈小。速度的單位是 sec/60°,意思是舵機轉動 60°所需要的時間。
電壓會直接影響舵機的性能,例如 Futaba S-9001 在 4.8V 時扭力為 3.9kg/cm、速度為 0.22 秒/60°,在 6.0V 時扭力為 5.2kg/cm、速度為 0.18 秒/60° 。若無特別註明,JR 的舵機都是以 4.8V 為測試電壓,Futaba則是以 6.0V 作為測試電壓。所謂天下沒有白吃的午餐,速度快、扭力大的舵機,除了價格貴,還會伴隨著高耗電的特點。因此使用高級的舵機時,務必搭配高品質、高容量的鋰電池,能提供穩定且充裕的電流,才可發揮舵機應有的性能。
舵機故障診斷對於提高飛行安全十分關鍵,而故障的漏檢和虛警則直接關係到飛行器的安全和飛行品質。近年來,國內外較為深入地研究了對過程建模的故障檢測方法,主要包括參數估計法、狀態觀測法以及等價空間法等。
舵機一般故障判斷:
1)炸機后舵機電機狂轉、舵盤搖臂不受控制、搖臂打滑------------------可以斷定:齒輪掃齒了,換齒輪。
2)炸機后舵機一致性銳減,現象是炸壞的舵機反應遲鈍,發熱嚴重,但是可以隨著控的指令運行,但是舵量很小很慢-------------基本斷定:舵機電機過流了,拆下電機后發現電機空載電流很大(>150MA),失去完好的性能(完好電機空載電流≤60-90MA),換舵機電機。
3)炸機后舵機打舵后無任何反應---------------基本確定舵機電子迴路斷路、接觸不良或舵機的電機、電路板的驅動部分燒毀導致的,先檢查線路,包括插頭,電機引線和舵機引線是否有斷路現象,如果沒有的話,就進行逐一排除,先將電機卸下測試空載電流,如果空載電流小於90MA,則說明電機是好的,那問題絕對是舵機驅動燒壞了,9-13克微型舵機電路板上面就有2個或四個小貼片三極體,換掉就可以了,有2個三極體的那肯定是用Y2或IY直接代換,也就是SS8550,如果是有四個三極體的H橋電路,則直接用2個Y1(SS8050)和2個(SS8550)直接代換,65MG的UYR ---- 用Y 1(SS8050 IC=1.5A); UXR------用Y2(SS8550,IC=1.5A)直接代換。
4)舵機故障是搖臂只能一邊轉動,另外一邊不動的話-----------判斷:舵機電機是好的,主要檢查驅動部分,有可能燒了一邊的驅動三極體,按照(3)維修即可。
5)維修好舵機后通電,發現舵機向一個方向轉動后就卡住不動了,舵機吱吱地響--------------說明舵機電機的正負極或電位器的端線接錯了,電機的兩個接線倒個方向就可以了。
6)嶄新的舵機買回來后,通電發現舵機狂抖,但用一下控的搖臂后,舵機一切正常----------說明舵機在出廠的時候裝配不當或齒輪精度不夠,這個故障一般發生在金屬舵機上面,如果不想退貨或者更換的話,自行解決的方法:卸下舵機后蓋,將舵機電機與舵機減速齒輪分離后,在齒輪之間擠點牙膏,上好舵機齒輪頂蓋,上好減速箱螺絲后,安上舵機搖臂,用手反覆旋轉搖臂碾磨金屬舵機齒輪,直至齒輪運轉順滑、齒輪摩擦噪音減小后,將舵機齒輪卸下汽油清洗后,裝齒輪上硅油組裝好舵機,即可解決舵機故障。
7)有一種故障舵機表現很古怪:搖動控的遙感,舵機有正常的反應,但是固定控的遙感某一位置后,故障舵機搖臂還在慢慢的運行,或者搖臂動作拖泥帶水,並來回動作------------------經過多次維修后發現問題所在:應該緊密卡在舵機末級齒輪中電位器的金屬轉柄,與舵機搖臂大齒輪(末級)結合不緊,甚至發生打滑現象,導致舵機無法正確尋找控發出的位置指令,反饋不準,不停尋找導致的,解決了電位器與搖臂齒輪的緊密結合后,故障可以排除。按照改方法檢修后故障仍舊存在的話,也有可能是舵機電機的問題或電位器的問題,需要綜合分析逐一排查!
8)故障舵機不停的抖舵,排除無線電干擾,動控搖臂仍舊抖動的話----------電位器老化,換之,或直接報廢掉,當配件!
9)數碼斜盤舵機裝機過後發現舵機運行不正常,快慢不一,退回廠家,後來換回3個后還是一致性差,最後才知道是什麼原因-----有些數碼舵機對BEC要求,加裝5.V3A 外置 BEC后,故障排除,與舵機質量無關。
