直流電動機
直流電動機
直流電動機是將直流電能轉換為機械能的電動機。因其良好的調速性能而在電力拖動中得到廣泛應用。直流電動機按勵磁方式分為永磁、他勵和自勵3類,其中自勵又分為並勵、串勵和復勵3種。
當直流電源通過電刷向電樞繞組供電時,電樞表面的N極下導體可以流過相同方向的電流,根據左手定則導體將受到逆時針方向的力矩作用;電樞表面S極下部分導體也流過相同方向的電流,同樣根據左手定則導體也將受到逆時針方向的力矩作用。這樣,整個電樞繞組即轉子將按逆時針旋轉,輸入的直流電能就轉換成轉子軸上輸出的機械能。由定子和轉子組成,定子:基座,主磁極,換向極,電刷裝置等;轉子(電樞):電樞鐵心,電樞繞組,換向器,轉軸和風扇等。
分為兩部分:定子與轉子。注意:不要把換向極與換向器弄混淆了。
定子包括:主磁極,機座,換向極,電刷裝置等。
轉子包括:電樞鐵芯,電樞(shu)繞組,換向器,軸和風扇等。
直流電動機轉子部分由電樞鐵芯、電樞、換向器等裝置組成,下面對構造中的各部件進行詳細介紹。
1.電樞鐵芯部分:其作用是嵌放電樞繞組和電末磁通,為了下降電機工作時電樞鐵芯中發作的渦流損耗和磁滯損耗。
2.電樞部分:作用是發作電磁轉矩和感應電動勢,而進行能量變換。電樞繞組有許多線圈或玻璃絲包扁鋼銅線或強度漆包線。
換向器由許多片構成的圓柱體之間用雲母絕緣,電樞繞組每一個線圈兩端區分接在兩個換向片上。直流發電機中換向器的作用是把電樞繞組中的交變電動熱變換為電刷間的直流電動勢,負載中就有電流通過,直流發電機向負載輸出電功率,同時電樞線圈中也肯定有電流通過。它與磁場相互作用發作電磁轉矩,其傾向與發電機相反,原想法只需抑制這一磁場轉矩才能鼓動電樞改變。因此,發電機向負載輸出電功率的還原,從原想法輸出機械功率,完結了直流發電機將機械能變換為電能的作用。
直流電機的勵磁方式是指對勵磁繞組如何供電、產生勵磁磁通勢而建立主磁場的問題。根據勵磁方式的不同,直流電機可分為下列幾種類型:

直流電動機
勵磁繞組與電樞繞組無聯接關係,而由其他直流電源對勵磁繞組供電的直流電機稱為他勵直流電機,接線如圖(a)所示。圖中M表示電動機,若為發電機,則用G表示。永磁直流電機也可看作他勵直流電機。
2.並勵直流電機
並勵直流電機的勵磁繞組與電樞繞組相併聯,接線如圖(b)所示。作為並勵發電機來說,是電機本身發出來的端電壓為勵磁繞組供電;作為並勵電動機來說,勵磁繞組與電樞共用同一電源,從性能上講與他勵直流電動機相同。
3.串勵直流電機
串勵直流電機的勵磁繞組與電樞繞組串聯后,再接於直流電源,接線如圖(c)所示。這種直流電機的勵磁電流就是電樞電流。
4.復勵直流電機
復勵直流電機有並勵和串勵兩個勵磁繞組,接線如圖(d)所示。若串勵繞組產生的磁通勢與並勵繞組產生的磁通勢方向相同稱為積復勵。若兩個磁通勢方向相反,則稱為 差復勵。
差復勵。
直流電動機
不同勵磁方式的直流電機有著不同的特性。一般情況直流電動機的主要勵磁方式是並勵式、串勵式和復勵式,直流發電機的主要勵磁方式是他勵式、並勵式和和復勵式。
特點
(一)調速性能好。所謂“調速性能”,是指電動機在一定負載的條件下,根據需要,人為地改變電動機的轉速。直流電動機可以在重負載條件下,實現均勻、平滑的無級調速,而且調速範圍較寬。
電動機拖動。
1.無刷直流電動機:無刷直流電動機是將普通直流電動機的定子與轉子進行了互換。其轉子為永久磁鐵產生氣隙磁通:定子為電樞,由多相繞組組成 。在結構上,它與永磁同步電動機類似。
。在結構上,它與永磁同步電動機類似。
直流電動機
無刷直流電動機定子的結構與普通的同步電動機或感應電動機相同.在鐵芯中嵌入多相繞組(三相、四相、五相不等).繞組可接成星形或三角形,並分別與逆變器的各功率管相連,以便進行合理換相。轉子多採用釤鈷或釹鐵硼等高矯頑力、高剩磁密度的稀土料,由於磁極中磁性材料所放位置的不同.可以分為表面式磁極、嵌入式磁極和環形磁極。由於電動機本體為永磁電機,所以習慣上把無刷直流電動機也叫做永磁無刷直流電動機。
2.有刷直流電動機:有刷電動機的2個刷(銅刷或者碳刷)是通過絕緣座固定在電動機后蓋上直接將電源的正負極引入到轉子的換相器上,而換相器連通了轉子上的線圈,3個線圈極性不斷的交替變換與外殼上固定的2塊磁鐵形成作用力而轉動起來。由於換相器與轉子固定在一起,而刷與外殼(定子)固定在一起,電動機轉動時刷與換相器不斷的發生摩擦產生大量的阻力與熱量。所以有刷電機的效率低下損耗非常大。但是它同樣具有製造簡單,成本低廉的優點。
直流電動機的性能與它的勵磁方式密切相關,通常直流電動機的勵磁方式有4種:直流他勵電動機、直流並勵電動機、直流串勵電動機和直流復勵電動機。掌握4種方式各自的特點:
1.直流他勵電動機:勵磁繞組與電樞沒有電的聯繫,勵磁電路是由另外直流電源供給的。因此勵磁電流不受電樞端電壓或電樞電流的影響。
2.直流並勵電動機:電路並聯,分流,並勵繞組兩端電壓就是電樞兩端電壓,但是勵磁
繞組用細導線繞成,其匝數很多,因此具有較大的電阻,使得通過他的勵磁電流較小。
3.直流串勵電動機:電流串聯,分壓,勵磁繞組是和電樞串聯的,所以這種電動機內磁場隨著電樞電流的改變有顯著的變化。為了使勵磁繞組中不致引起大的損耗和電壓降,勵磁繞組的電阻越小越好,所以直流串勵電動機通常用較粗的導線繞成,他的匝數較少。
4.直流復勵電動機:電動機的磁通由兩個繞組內的勵磁電流產生。
由於電機電樞迴路電阻和電感都較小,而轉動體具有一定的機械慣性,因此當電機接通電源后,起動的開始階段電樞轉速以及相應的反電動勢很小,起動電流很大。最大可達額定電流的15~20倍。這一電流會使電網受到擾動、機組受到機械衝擊、換向器發生火花。因此直接合閘起動只適用於功率不大於4千瓦的電動機(起動電流為額定電流的6~8倍)。
為了限制起動電流,常在電樞迴路內串入專門設計的可變電阻,其原理接線見圖1。在起動過程中隨著轉速的不斷升高及時逐級將各分段電阻短接,使起動電流限制在某一允許值以內。這種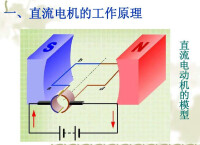 起動方法稱為串電阻起動,非常簡單,設備輕便,廣泛應用於各種中小型直流電動機中。但由於起動過程中能量消耗大,不適於經常起動的電機和中、大型直流電動機。但對於某些特殊需要,例如城市電車雖經常起動,為了簡化設備,減輕重量和操作維修方便,通常採用串電阻起動方法。
起動方法稱為串電阻起動,非常簡單,設備輕便,廣泛應用於各種中小型直流電動機中。但由於起動過程中能量消耗大,不適於經常起動的電機和中、大型直流電動機。但對於某些特殊需要,例如城市電車雖經常起動,為了簡化設備,減輕重量和操作維修方便,通常採用串電阻起動方法。
直流電動機
對容量較大的直流電動機,通常採用降電壓起動。即由單獨的可調壓直流電源對電機電樞供電,控制電源電壓既可使電機平滑起動,又能實現調速。此種方法電源設備比較複雜。
電動機的轉速n隨轉矩T而變化的特性【n=f(T)】稱為機械特性。它是選用電動機的一個重要依據。各類電動機都因有自己的機械特性而適用於不同的場合。幾種直流電動機的機械特性見圖2。
調速 從直流電動機的電樞迴路看,電源電壓U與電動機的反電動勢Ed和電樞電流Id在電樞迴路電阻Rd上的電壓降必須平衡。即U=Ed+IdRd
反電動勢又與電動機的轉速n和磁通φ有關,電樞電流又與機械轉矩M和磁通φ有關。即z4系列直流電動機
Ed=Cφn
M=CφId式中C
為常數。由此可得式中n0為空載轉速,k為Rа/C2。以上是未考慮鐵心飽和等因素時的理想關係,但對實際直流電動機的分析也有指導意義。由上可見直流電動機有3種調速方法:調節勵磁電流、調節電樞端電壓和調節串入電樞迴路的電阻。調節電樞迴路串聯電阻的辦法比較簡便,但能耗較大;

直流電動機
直流無刷電機的控制結構,直流無刷電機是同步電機的一種,也就是說電機轉子的轉速受電機定子旋轉磁場的速度及轉子極數(P)影響,N=120.f/P。在轉子極數固定情況下,改變定子旋轉磁場的頻率就可以改變轉子的轉速。直流無刷電機即是將同步電機加上電子式控制(驅動器),
控制定子旋轉磁場的頻率並將電機轉子的轉速回授至控制中心反覆校正,以期達到接近直流電機特性的方式。也就是說直流無刷電機能夠在額定負載範圍內當負載變化時仍可以控制電機轉子維持一定的轉速。
直流無刷驅動器包括電源部及控制部:電源部提供三相電源給電機,控制部則依需求轉換輸入電源頻率。電源部可以直接以直流電輸入(一般為24V)或以交流電輸入(110V/220V),如果輸入式交流電就得先經轉換器(converter)轉成直流。不論是直流電輸入或交流電輸入要轉入電機線圈前須先將直流電壓由換流器(inverter)轉成3相電壓來驅動電機。換流器(inverter)一般由6個功率晶體管(Q1~Q6)分為上臂(Q1、Q3、Q5)/下臂(Q2、Q4、Q6)連接電機作為控制流經電機線圈的開關。控制部則提供PWM(脈衝寬度調製)決定功率晶體管開關頻度及換流器(inverter)換相的時機。直流無刷電機一般希望使用在當負載變動時速度可以穩定於設定值而不會變動太大的速度控制,所以電機內部裝有能感應磁場的霍爾感測器(hall-sensor),作為速度之閉迴路控制,同時也做為相序控制的依據。但這只是用來做為速度控制並不能拿來做為定位控制。
直流無刷電機的控制原理,要讓電機轉動起來,首先控制部就必須根據hall-sensor感應到的電機轉子所在位置,然後依照定子繞線決定開啟(或關閉)換流器(inverter)中功率晶體管的順序,inverter中之AH、BH、CH(這些稱為上臂功率晶體管)及AL、BL、CL(這些稱為下

直流電動機
基本上功率晶體管的開法可舉例如下:AH、BL一組→AH、CL一組→BH、CL一組→BH、AL一組→CH、AL一組→CH、BL一組,但絕不能開成AH、AL或BH、BL或CH、CL。此外因為電子零件總有開關的響應時間,所以功率晶體管在關與開的交錯時間要將零件的響應時間考慮進去,否則當上臂(或下臂)尚未完全關閉,下臂(或上臂)就已開啟,結果就造成上、下臂短路而使功率晶體管燒毀。
當電機轉動起來,控制部會再根據驅動器設定的速度及加/減速率所組成的命令(Command)與hall-sensor信號變化的速度加以比對(或由軟體運算)再來決定由下一組(AH、BL或AH、CL或BH、CL或……)開關導通,以及導通時間長短。速度不夠則開長,速度過頭則減短,此部分工作就由PWM來完成。PWM是決定電機轉速快或慢的方式,如何產生這樣的PWM才是要達到較精準速度控制的核心。
高轉速的速度控制必須考慮到系統的CLOCK解析度是否足以掌握處理軟體指令的時間,另外對於hall-sensor信號變化的資料存取方式也影響到處理器效能與判定正確性、 實時性。至於低轉速的速度控制尤其是低速起動則因為回傳的hall-sensor信號變化變得更慢,怎樣擷取信號方式、處理時機以及根據電機特性適當配置控制參數值就顯得非常重要。或者速度回傳改變以encoder變化為參考,使信號解析度增加以期得到更佳的控制。電機能夠運轉順暢而且響應良好,P.I.D.控制的恰當與否也無法忽視。之前提到直流無刷電機是閉迴路控制,因此回授信號就等於是告訴控制部電機轉速距離目標速度還差多少,這就是誤差(Error)。知道了誤差自然就要補償,方式有傳統的工程式控制制如P.I.D.控制。但控制的狀態及環境其實是複雜多變的,若要控制的堅固耐用則要考慮的因素恐怕不是傳統的工程式控制制能完全掌握,所以模糊控制、專家系統及神經網路也將被納入成為智能型P.I.D.控制的重要理論。
實時性。至於低轉速的速度控制尤其是低速起動則因為回傳的hall-sensor信號變化變得更慢,怎樣擷取信號方式、處理時機以及根據電機特性適當配置控制參數值就顯得非常重要。或者速度回傳改變以encoder變化為參考,使信號解析度增加以期得到更佳的控制。電機能夠運轉順暢而且響應良好,P.I.D.控制的恰當與否也無法忽視。之前提到直流無刷電機是閉迴路控制,因此回授信號就等於是告訴控制部電機轉速距離目標速度還差多少,這就是誤差(Error)。知道了誤差自然就要補償,方式有傳統的工程式控制制如P.I.D.控制。但控制的狀態及環境其實是複雜多變的,若要控制的堅固耐用則要考慮的因素恐怕不是傳統的工程式控制制能完全掌握,所以模糊控制、專家系統及神經網路也將被納入成為智能型P.I.D.控制的重要理論。
直流電動機
1.額定功率PN:電機軸上輸出的機械功率。
2.額定電壓UN:額定工作情況下的電樞上加的直流電壓。(例:110V,220V,440V)
3.額定電流IN:額定電壓下軸上輸出額定功率時的電流
(並勵包括勵磁和電樞電流)。
額定轉速nN:在PN,UN,IN時的轉速。
4.直流電機的轉速一般在500r/min以上。特殊的直流電機轉速可以做到很低(如每分鐘幾轉)或很高(每分鐘3000轉以上)。
注意:調速時對於沒有調速要求的電機,最大轉速不能超過1.2nN。
(1)恆轉矩的生產機械(TL一定,和轉速無關)要選硬特性的電動機,如:金屬加工、起重機械等。
(2)通風機械負載,機械負載TL和轉速n的平方成正比。這類機械也要選硬特性的電動機拖動。
(3)恆功率負載(P一定時,T和n成反比),要選軟特性電機拖動。如:電氣機車等。
改變直流電動機轉動方向的方法有兩種:
.
一是電樞反接法,即保持勵磁繞組的端電壓極性不變,通過改變電樞繞組端電壓的極性使電動機反轉;
二是勵磁繞組反接法,即保持電樞繞組端電壓的極性不變,通過改變勵磁繞組端電壓的極性使電動機調向。當兩者的電壓極性同時改變時,則電動機的旋轉方向不變。
他勵和並勵直流電動機一般採用電樞反接法來實現正反轉。他勵和並勵直流電動機不宜採用勵磁繞組反接法實現正反轉的原因是因為勵磁繞組匝數較多,電感量較大。當勵磁繞組反接時,在勵磁繞組中便會產生很大的感生電動勢.這將會損壞閘刀和勵磁繞組的絕緣。
串勵直流電動機宜採用勵磁繞組反接法實現正反轉的原因是因為串勵直流電動機的電樞兩端電壓較高,而勵磁繞組兩端電壓很低,反接容易,電動機車常採用此法。
