共找到2條詞條名為世界坐標系的結果 展開
- 世界坐標系
- 地心坐標系
世界坐標系
世界坐標系
世界坐標系是系統的絕對坐標系,在沒有建立用戶坐標系之前畫面上所有點的坐標都是以該坐標系的原點來確定各自的位置的。
1、世界坐標系定義為:帶有小圓的圓心為原點ow,xw軸水平向右,yw軸向下,zw由右手法則確定.,v′n為實時圖中對應的統計特徵向量。
2、是系統的絕對坐標系也稱為世界坐標系。在沒有建立用戶坐標系之前畫面上所有點的坐標都是以該坐標系的原點來確定各自的位置的。
3、設一個基準坐標系Xw—Yw—Zw稱為世界坐標系,(xw,yw,zw)為空間點P在世界坐標系下的坐標.(u,v)為P點在圖像直角坐標系下的坐標。
4、這個坐標系稱為世界坐標系。計算機對數量化。
世界坐標系用於圖形轉換的起始坐標空間。最大尺寸是2^32單位高和2^32單位寬。
支持縮放、平移、旋轉、變形、投射等轉換操作。
世界坐標系統(WCS)是AutoCAD的基本坐標系。
繪圖期間,原點和坐標軸保持不變。世界坐標系由三個互相垂直並相交的坐標軸X,Y,Z組成。
默認情況下,X軸正向為屏幕水平向右,Y軸正向為垂直向上,Z軸正向為垂直屏幕平面指向使用者。坐標原點在屏幕左下角。
由於攝像機可安放在環境中的任意位置,在環境中選擇一個基準坐標系來描述攝像機的位置,並用它描述環境中任何物體的位置,該坐標系稱為世界坐標系。攝像機坐標系與世界坐標系之間的關係可以用旋轉矩陣與平移向量來描述。
與此相關的是圖像坐標系和攝像機坐標系
1)圖像坐標系(Pixel coordinate system)
世界坐標系
2)成像平面坐標系(Retinal coordinate system)
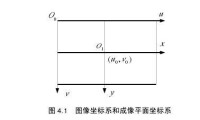
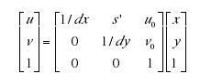
由於圖像坐標系只表示象素位於數字圖像的列數和行數,並沒有用物理單位表示出該象素在圖像中的物理位置,因而需要再建立以物理單位(例如厘米)表示的成像平面坐標系x-y,如圖4.1所示。我們用(x,y)表示以物理單位度量的成像平面坐標系的坐標。在x-y坐標系中,原點定義在攝像機光軸和圖像平面的交點處,稱為圖像的主點(principal point),該點一般位於圖像中心處,但由於攝像機製作的原因,可能會有些偏離,在坐標系下的坐標為(u0,v0),每個象素在x軸和y軸方向上的物理尺寸為dx、dy,兩個坐標系的關係如下:
世界坐標系
3)攝像機坐標系(Camera coordinate system)
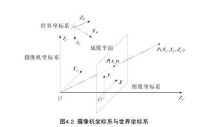
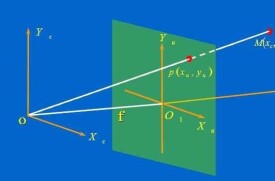
攝像機成像幾何關係可由圖4.2表示,其中O點稱為攝像機光心,軸和軸與成像平面坐標系的x軸和y軸平行,軸為攝像機的光軸,和圖像平面垂直。光軸與圖像平面的交點為圖像主點O',由點O與軸組成的直角坐標系稱為攝像機坐標系。OO'為攝像機焦距。
世界坐標系
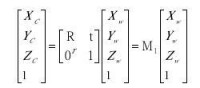
在環境中還選擇一個參考坐標系來描述攝像機和物體的位置,該坐標系稱為世界坐標系。攝像機坐標系和世界坐標系之間的關係可用旋轉矩陣R與平移向量t來描述。由此,空間中一點P在世界坐標系和攝像機坐標系下的齊次坐標分別為和且存在如下關係:
世界坐標系
攝影機坐標系的原點為攝像機光心,x軸與y軸與圖像的X,Y軸平行,z軸為攝像機光軸,它與圖像平面垂直。光軸與圖像平面的交點,即為圖像坐標系的原點,構成的直角坐標系稱為攝像機坐標系。
基本信息
- 中文名
- 世界坐標系
- 定義
- 稱為世界坐標系.計算機對數量化
- 建立用戶
- 坐標系之前畫面上所有點的坐標
- 屬於
- 絕對坐標系