全景攝像頭
用戶需求度較高的安全性配置
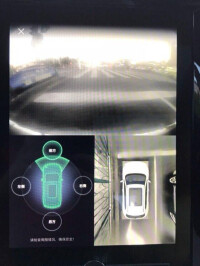
為了解決倒車影像系統不能全面照顧周圍視角的問題,有些廠家開發了全景攝像頭。這套系統的核心就在於在車頭、車側增加了多個攝像頭,從而能夠獲取車輛周邊的實時影像。
景攝、尾、左右視鏡裝攝。圖據傳圖單元。圖像處理單元中,電腦將對它們進行變形、拼接處理,從而形成一張從車頂鳥瞰的俯視圖。這樣獨特的視角可以很好地幫助缺乏“車感”的駕駛員去理解自己的走向和位置。如果怕鳥瞰圖會影響對細節的觀察,還可以通過切換畫面在顯示器中選擇其他方向獨立的視圖。這就保障了在倒車時可以兼顧多個方向的情況,再輔以雷達測距,倒車入位的難度大大降低。
全景攝像頭

全景攝像頭
感光晶元是組成數碼攝像頭的重要組成部分,根據元件不同分為:
CCD(ChargeCoupledDevice,電荷耦合元件)應用在攝影攝像方面的高端技術元件。
CMOS(ComplementaryMetal-OxideSemiconductor,金屬氧化物半導體元件)應用於較低影像品質的產品中。
CCD元件的尺寸多為1/3英寸或者1/4英寸,在相同的解析度下,宜選擇元件尺寸較大的為好。
CCD的優點是靈敏度高,噪音小,信噪比大。但是生產工藝複雜、成本高、功耗高。
CMOS的優點是集成度高、功耗低(不到CCD的1/3)、成本低。但是噪音比較大、靈敏度較低、對光源要求高。在相同像素下CCD的成像往往通透性、明銳度都很好,色彩還原、曝光可以保證基本準確。而CMOS的產品往往通透性一般,對實物的色彩還原能力偏弱,曝光也都不太好。
所以我們在使用攝像頭,尤其是採用CMOS晶元的產品時就更應該注重技巧:
首先不要在逆光環境下使用(這點CCD同),尤其不要直接指向太陽,否則“放大鏡燒螞蟻”的慘劇就會發生在您的攝像頭上。其次環境光線不要太弱,否則直接影響成像質量。克服這種困難有兩種辦法,一是加強周圍亮度,二是選擇要求最小照明度小的產品,有些攝像頭已經可以達到5lux。
最後要注意的是合理使用鏡頭變焦,不要小瞧這點,通過正確的調整,攝像頭也同樣可以擁有拍攝晶元的功能。市場銷售的數碼攝像頭中,基本是CCD和CMOS平分秋色。在採用CMOS為感光元器件的產品中,通過採用影像光源自動增益補強技術,自動亮度、白平衡控制技術,色飽和度、對比度、邊緣增強以及伽馬矯正等先進的影像控制技術,完全可以達到與CCD攝像頭相媲美的效果。受市場情況及市場發展等情況的限制,攝像頭採用CCD圖像感測器的廠商為數不多,主要原因是採用CCD圖像感測器成本高的影響。
圖像感測器屬於光電產業里的光電元件類,隨著數碼技術、半導體製造技術以及網路的迅速發展,市場和業界都面臨著跨越各平台的視訊、影音、通訊大整合時代的到來,勾划著未來人類的日常生活的美景。以其在日常生活中的應用,無疑要屬數碼相機產品,其發展速度可以用日新月異來形容。短短的幾年,數碼相機就由幾十萬像素,發展到400、500萬像素甚至更高。不僅在發達的歐美國家,數碼相機已經佔有很大的市場,就是在發展中的中國,數碼相機的市場也在以驚人的速度在增長,因此,其關鍵零部件——圖像感測器產品就成為當前以及未來業界關注的對象,吸引著眾多廠商投入。以產品類別區分,圖像感測器產品主要分為CCD、CMOS以及CIS感測器三種。本文將主要簡介CCD以及CMOS感測器的技術和產業發展現狀。

全景攝像頭
一般認為,CCD感測器有以下優點:
1.高解析度(HighResolution):像點的大小為μm級,可感測及識別精細物體,提高影像品質。像素數目從10多萬增加到400~500萬像素;
2.低雜訊(LowNoise)高敏感度:CCD具有很低的讀出雜訊和暗電流雜訊,因此提高了信噪比(SNR),同時又具高敏感度,很低光度的入射光也能偵測到,其訊號不會被掩蓋,使CCD的應用較不受天候拘束;
3.動態範圍廣(HighDynamicRange):同時偵測及分辨強光和弱光,提高系統環境的使用範圍,不因亮度差異大而造成信號反差現象;
4.良好的線性特性曲線(Linearity):入射光源強度和輸出訊號大小成良好的正比關係,物體資訊不致損失,降低信號補償處理成本;
高光子轉換效率(HighQuantumEfficiency):很微弱的入射光照射都能被記錄下來,若配合影像增強管及投光器,即使在暗夜遠處的景物仍然還可以偵測得到;
5.大面積感光(LargeFieldofView):利用半導體技術已可製造大面積的CCDD晶片,與傳統底片尺寸相當的35mm的CCD已經開始應用在數碼相機中,成為取代專業有利光學相機的關鍵元件;
光譜響應廣(BroadSpectralResponse):能檢測很寬波長範圍的光,增加系統使用彈性,擴大系統應用領域;
6.低影像失真(LowImageDistortion):使用CCD感測器,其影像處理不會有失真的情形,使原物體資訊忠實地反應出來;
7.體積小、重量輕:CCD具備體積小且重量輕的特性,因此,可容易地裝置在人造衛星及各式導航系統上;
8.低秏電力,不受強電磁場影響;
9.電荷傳輸效率佳:該效率係數影響信噪比、解像率,若電荷傳輸效率不佳,影像將變較模糊;
10.可大批量生產,品質穩定,堅固,不易老化,使用方便及保養容易。
根據In-Stat在2001年對全球圖像感測器的研究報告中指出,CCD產業前七大廠商皆為日系廠商,佔了全球98.5%的市場份額,在技術發展方面,較有特色的主要廠商應為索尼、飛利普和柯達公司。
飛利普公司在CCD產品方面的優勢為,具有業界最大尺寸的CCD感測器,在數碼相機的應用中,其35mm尺寸的CCD已經應用在“Contax”的數碼相機中,成為專業數碼相機的代言人。其次該公司還具有獨特的“Frame-TransferCCD”(面掃描)技術,該產品在應用中,可實現每秒30-60幅的速率。這是真正視頻信號的速度。
柯達的CCD採用了廣受好評的ITOCCD(氧化銦錫)技術,而不是傳統的聚硅化合物。其特點是敏銳度更高,透光性比一般CCD提高了20%,對於一般CCD感應較弱的藍光以及抗雜訊干擾方面有突破性的改善,其對藍光感應能力提高了2.5倍,同時大幅降低了雜訊干擾,使影像更強銳利、色彩更加準確,為專業數碼攝影提供了高解析度、銳利度的影像。
傳統CCD使用的是矩形的感光單元,而富士公司研製的“SuperCCD(超級蜂窩結構)使用的是八邊形的感光單元,使用了蜂巢的八邊形結構,因此其感光單元面積要高於傳統CCD。這樣會獲得三個好處,一是可以提高CCD的感光度、二是提高動態範圍、三是提高了信噪比。這三個優點加上SuperCCD更高的生成像素成為富士公司在數碼相機產品上的最大賣點。
作用:全景攝像頭不一定是360度全部攝像的,只是比一般攝像頭的攝像角度寬廣,比如普通攝像頭的攝像廣角是120度,全景的也就是160度—180度之間,比普通的攝像頭看得更廣!

全景攝像頭
(1)彩色攝像機:適用於景物細部辨別,如辨別衣著或景物的顏色。因有顏色而使信息量增大,信息量一般認為是黑白攝像機的10倍。
(2)黑白攝像機:適用於光線不足地區及夜間無法安裝照明設備的地區,在僅監視景物的位置或移動時,可選用解析度通常高於彩色攝像機的黑白攝像機。
依攝像機解析度劃分
(1)影像像素在25萬像素(pixel)左右、彩色解析度為330線、黑白解析度400線左右的低檔型。
(2)影像像素在25萬~38萬之間、彩色解析度為420線、黑白解析度在500線上下的中檔型。
(3)影像在38萬點以上、彩色解析度大於或等於480線、黑白解析度,600線以上的高解析度。
依攝像機靈敏度劃分
(1)普通型:正常工作所需照度為1~3LUX(勒克斯)。
(2)月光型:正常工作所需照度為0.1LUX左右。
(3)星光型:正常工作所需照度為0.01LUX以下。
(4)紅外照明型:原則上可以為零照度,採用紅外光源成像。
按攝像元件的CCD靶面的大小劃分
(1)1in靶面尺寸為寬12.7mmX高9.6mm,對角線16mm。
(2)2/3in靶面尺寸為寬8.8mmX高6.6mm,對角線11mm。
(3)1/2in靶面尺寸為寬6.4mmX高4.8mm,對角線8mm。
(4)1/3in靶面尺寸為寬4.8mmX高3.6mm,對角線6mm。
(5)1/4in靶面尺寸為寬3.2mmX高2.4mm,對角線4mm。
(6)1/5in正在開發之中,尚未推出正式產品
此外CCD攝像機有PAL制和NTSC制之分,還可以按圖像信號處理方式劃分或按攝像機結構區分。
鏡頭(LENS)
輔助泊車:駕駛員在倒車過程中,只需要通過中控台的圖像判斷四周障礙物,可以提高倒車安全性能
通過窄路匯車示意圖通過窄路匯車:通過兩邊的側視攝像頭,輕易判斷車身兩邊的物體與車之間的距離,可以避免擦碰,順利通過複雜路面當停車位置前後障礙物位置很低,沒有雷達或雷達不能探測時,通過中控台的前後圖像就能輕易判斷車的前後和障礙物的距離
擴展視野:當車行駛至交叉路口時,可以通過中控台看到前方或後方180度範圍圖像,從而輕易判斷匯車情形
線路修正:當車直行時,可以直接打開前視的攝像頭,如果車子發生偏離直行線路時,駕駛者就可以通過中控台很直接地發現,並進行及時修正
外形區分根據鏡頭的性能及外形區分,有P型、E型、L型和自動變焦鏡頭等類型,來自中國儀器超市的資料分別敘述如下:
1.P型鏡頭
(1)自動定位鏡頭,本身瞳焦已經調節好,需要檢驗從最大倍率到最小倍率的清晰度,是否一致、是否清晰。
(2)檢驗同軸度,即最大倍率到最小倍率取像在同一位置,不能偏移或偏移太大,均視為不良品,必需重新更換鏡頭。
(3)光學放大倍率為0.7—4.5X,即0.7倍到4.5倍之間共九種倍率。
(4)清晰度根據校正塊、實際對象成像反映來進行判斷。
2.E型鏡頭
(1)此鏡頭為普通工業鏡頭,需要手動調節瞳焦,在機台安裝好以後,手動調節使用最大倍率和最小倍率時,圖像同樣的清晰,如果不能調節清晰度視為不良品,如果調節後鏡頭有晃動等不穩定因素存在,也視為不良品。
(2)光學放大倍率為0.7—4.5X。
(3)清晰度根據校正塊、實際對象成像反映來進行判讀。
3.L型鏡頭
(1)光學放大倍率為0.7—4.5X。
(2)清晰度根據校正塊、實際對象成像反映來進行判讀。
4.自動變焦鏡頭
(1)為自動定位鏡頭本身瞳焦已經調節好,需要檢驗從最大倍率到最小倍率的清晰度,是否一致、是否清晰。
(2)光學放大倍率為0.7—4.5X。
(3)清晰度根據校正塊、實際對象成像反映來進行判讀。
