超聲波馬達
電磁能量變換成轉動的數碼配件
超聲波馬達(UltraSonic Motor)的簡稱是:USM,最早應用於照相機上是Canon EF系列鏡頭。最早裝備了USM馬達的鏡頭是Canon EF 300/2.8L USM.傳統的馬達都是基於電磁原理工作的,將電磁能量變換成轉動能量。而USM則是基於利用超聲波振動能量變換成轉動能量的全新原理來工作的。
在超聲波馬達問世之前,實際上已有利用壓電材料振動特性來驅動的壓電馬達,惟其頻率並不限於超聲波的範圍。早在一九四八年威廉和布朗就申請了「壓電馬達」的美國專利;一九六一年寶路華鐘錶公司研製出音叉驅動的手錶;一九七〇~一九七二年西門子和松下兩公司發展出線型壓電步進馬達,不過因為無法達到較大的輸出力及效率,所以當時並沒有普遍地應用。
一九七三年美國IBM公司的巴特(H.V. Barth),首次提出利用壓電組件以超聲波振動的方式來驅動的馬達,但因為磨耗上的問題,和之前的手錶案例一樣,僅發表出來而沒有實際上的應用。幾乎同時,俄國人V.H. Lavrinenko也設計了一些驅動原理相同的馬達結構;一九七八年瓦西里耶夫(P.E. Vasiliev)則是利用超聲波轉換器作為馬達的驅動來源,不過都沒有發展出完整的馬達結構。
一九八○年日本指田年生(Toshiiku Sashida)研製出以振動片驅動的超聲波馬達,具有較完整的馬達結構。至此,以壓電材料產生超聲波振動來驅動馬達的概念就開始慢慢地發展起來。雖然因為磨耗以及溫度上升等問題,使得這些超聲波馬達仍然沒有實際的應用,不過已具有高精度、低速高轉矩等特色。
直到一九八二年,指田年生又發展出一種新型的超聲波馬達驅動方式,在設計上已經考慮到磨耗的改善,這才是第一個真正達到具有商業應用價值的超聲波馬達,且首先應用在照相機的自動對焦系統中,這也是目前使用超聲波馬達最多的領域。
佳能的EF自動對焦鏡頭都內置了兩個馬達,一個負責自動對焦,另一個負責電磁光圈,佳能自動對焦馬達有三大類,弧形馬達(ARC FORM DRIVE,簡稱AFD),超聲波馬達(ULTRASONIC MOTOR,簡稱USM)和微型馬達(MICRO MOTOR,簡稱MM)。
弧形馬達是佳能EF自動對焦鏡頭中最早使用的馬達,它是一種弧形無刷電機,這樣它就可以安放在鏡頭圓柱壯的鏡筒內而不用改變鏡筒的形狀了,由於其轉子小巧的尺寸使得它有非常好的開始/停止反應和控制力,又由於它的無刷設計使得它有很長的使用壽命。雖然隨著高性能的超聲波馬達和成本更低的微型馬達的出現,使用這種馬達的鏡頭在現在已經不多見了,但在某些著名的EF鏡頭中我們仍然能“看到”它的身影,如EF50mm f/2.5 Compact Macro和EF100-300mm f/5.6 L以及EF135mm f/2.8 Soft Focus柔焦鏡頭等。
超聲波馬達和傳統的馬達有很大區別,不管傳統的馬達有多少種,其原理一般就是將電磁力轉變為轉動力,而超聲波馬達的轉動力則是產生於超聲波振動的能量。如上所述,超聲波馬達分環形和微型超聲波馬達兩種。
環形超聲波馬達的定子和轉子的直徑和鏡筒直徑相當,可以和鏡筒完美的結合。超聲波馬達的優點在於:一. 由於其低轉速和高扭矩的特性,使得它可以直接驅動鏡頭而不需要額外的減速機構;二. 定位扭矩大,換句話說就是當馬達停下來的時候,鏡頭就像有剎車那樣自動停止對焦;三. 結構非常簡單;四. 對啟動和停止的控制能力非常好,它可以快速啟動,也可以立即停止,而且可以被很精確地控制;五. 操作起來非常安靜—幾乎無聲。除此之外,佳能的環形超聲波馬達還有如下特點:六. 其高效率和低能耗的特性使得它可以用相機的電池來供電;七. 環狀的馬達和鏡頭鏡筒非常合適;八. 低旋轉速度非常適合鏡頭的驅動;九. 旋轉速度可以在0.2RPM(五分鐘旋轉一周)到80RPM(每分鐘旋轉80周)的大範圍內連續無級的調整,所以可以實現對鏡頭的高精度和高速驅動;十. 可以實現高精度的手控電驅動的調焦,即所謂的全時手動功能;十一. 操作溫度範圍非常寬,可以在攝氏零下30度到零上60度的溫度環境下正常工作,保證了惡劣環境下的穩定操作。
微型超聲波馬達和環形超聲波馬達不一樣,它的定子和轉子等被整合在一個非常小的裝置中,與環形超聲波馬達相比有如下的特點:由於沒有鏡頭直徑的限制,微型超聲波馬達可以不用考慮光學系統的結構而裝在各種鏡頭內;其轉子、定子和能量輸出部分被整合到一個非常小的裝置中,因此它的尺寸和重量大約只是環形超聲波馬達的一半;其成本只是普通環形超聲波馬達的三分之一,因此可以大規模的用於低成本的鏡頭中。
一般來說環形超聲波馬達主要用於L級專業鏡頭,而微型超聲波馬達則主要被用於我們所說的業餘鏡頭中,但在佳能的業餘鏡頭中也有使用環形超聲波馬達的鏡頭,它們是:EF20-35mm f/3.5-4.5 USM; EF24-85mm f/3.5-4.5 USM; EF28-105mm f/3.5-4.5 USM/ EF28-105mm f/3.5-4.5 USM II; EF28-135mm f/3.5-5.6 IS USM和EF100-300mm f/4.5-5.6 USM,這樣作為普通攝影愛好者的我們如使用上述幾款鏡頭也能感受環形超聲波馬達帶來的寧靜、高速的自動對焦和全時手動的樂趣。
微型馬達,除了弧形馬達和超聲波馬達外,佳能還有另外一種馬達—微型馬達,微型馬達一般用於佳能價格很低的普及鏡頭中,如EF50mm f/1.8II和那些非USM的普及型變焦鏡頭,如EF28-80mm f/3.5-5.6; EF75-300mm f/4-5.6等,但佳能有一款“很有名”的鏡頭也用的是微型馬達,它就是EF100mm f/2.8 Macro微距鏡頭,想來佳能認為一般使用微距的人是不會使用自動對焦的吧。
全時手動和內對焦/后對焦在佳能EF鏡頭中的應用
一般來說,使用環形超聲波馬達的鏡頭都可以實現全時手動,而使用微型超聲波馬達的鏡頭則不行,但這並不表明微型超聲波馬達不能實現全時手動,比如著名的EF50mm f/1.4使用的就是微型超聲波馬達,但它和那些使用環形超聲波馬達的鏡頭一樣,也可以全時手動,所以我們可以說佳能為了保持環形超聲波馬達的“優越性”不願意將全時手動這一個非常有用的功能賦予所有的微型超聲波馬達。
使用環形超聲波馬達的鏡頭一般都是採用內對焦或后對焦結構的,因此在對焦時鏡頭的前鏡片是不會跟著轉動的,而大多微型超聲波馬達和微型馬達和許多使用弧形馬達的鏡頭則不行,當然也有例外如使用弧形馬達的EF135mm f/2.8 Soft Focus柔焦鏡頭,EF24mm f/2.8和已經被EF17-35mm f/2.8 L USM取代的EF20-35mm f/2.8 L等早期上市的EF鏡頭
人耳所能聽到的聲音頻率範圍大約在20赫茲~20千赫茲之間,而超過20千赫茲以上,人耳無法辨識的頻率便稱為超聲波。
那麼究竟什麼是超聲波馬達?其基本工作原理又如何?簡單地說,利用壓電材料輸入電壓會產生變形的特性,使其能產生超聲波頻率的機械振動,再透過摩擦驅動的機構設計,讓超聲波馬達如同電磁馬達一般,可做旋轉運動或直線式移動。
通常電磁馬達運轉時我們會覺得有雜音,這是因為馬達內部結構產生振動,而振動頻率恰好在我們耳朵可以感受的頻率範圍內。超聲波馬達的振動頻率則設計在人耳所能聽到的範圍之外,所以當它運轉時我們感覺不到有聲音,因而覺得非常安靜,這是超聲波馬達一個相當重要的特色。

解剖圖
1990年,Canon實現了量產,開始將環形USM大量應用於普通鏡頭。
1992年,Canon開發出微型USM,使EF鏡頭全面USM化的進程加快。
環形USM結構和原理
根據將超聲波振動能量變換的方法來分,有三類USM:
原理圖
2、行波型(Traveling Wave Type);
3、振簧型(Vibrating Reed Type).
Canon EF鏡頭中使用的USM,全部屬於行波型。
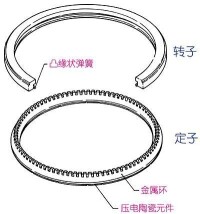
環形USM的結構很簡單:由具有彈性的定子和轉子組成。
定子是一金屬環,底部有壓電陶瓷元件,上部均勻排列著梯形凸出物。
定子是用特殊材料製造的,它的熱膨脹係數同壓電陶瓷元件的一樣,這樣可以避免溫度變化的影響。
轉子是一個鋁質環,通過凸緣狀彈簧與定子結合在一起。由於鋁材比較軟,所以結合部位是經過特殊處理,增加其耐磨性能。
USM的基本特點:
1、具有低轉速大扭矩的輸出特性;
2、制動力矩大;
3、結構簡單;
4、馬達啟動和制動的可控性非常好;
5、轉動聲音非常小,幾乎無聲。

原理圖
6、高效率,低功耗;
7、環形的馬達可以與鏡身完美地結合;
8、低轉速,特別適合鏡頭的AF驅動;
9、轉動速度可以在0.2rpm ~ 80rpm範圍內任意控制;
10、可以實現靈敏度可調的電子MF;
11、工作環境溫度是:-30℃ ~ +60℃。
Canon曾經公布過的三種規格的環形USM:
USM-M1 USM-L1 USM-L2
尺寸(mm): φ62-54 x 10 φ77-67 x 10 φ72-63 x 10
用於鏡頭: EF 14/2.8L USM ; EF 100/2 USM;EF 200/2.8L USM;EF 300/4L USM;EF 28-80/3.5-5.6 USM;EF 28-105/3.5-4.5 USM;EF 35-135/4-5.6 USM;EF 35-350/3.5-5.6L USM;EF 70-210/3.504.5 USM;EF 100-300/4.5-5.6 USM; EF 50/1.0L USM;EF 85/1.2L USM;EF 200/1.8L USM;EF 300/2.8L USM;EF 400/2.8L USM;EF 500/4.5L USM;EF 600/4L USM; EF 28-80/2.8-4L USM
重量(g):26 45 45 ……
現在基本使用的是USM-M1和USM-L1,USM-L2已經不再使用。
基本信息
- 中文名
- 超聲波馬達
- 外文名
- Ultrasonic motor
- 別名
- USM
- 類型
- 攝影
- 原理
- 電磁能量變換成轉動能量
- 優勢
- 轉動聲音非常小,幾乎無聲等
- 屬於
- 數碼
- 1992年
- Canon開發出微型USM