反接制動
電機的一種制動方式
反接制動是電機的一種制動方式,它通過反接相序,使電機產生起阻滯作用的反轉矩以便制動電機。反接制動的實質:使電動機欲反轉而制動。
反接制動是電機的一種制動方式,它通過反接相序,使電機產生起阻滯作用的反轉矩以便制動電機。
在生產過程中,經常需要採取一些措施使電動機儘快停轉,或者從某高速降到某低速運轉,或者限制位能性負載在某一轉速下穩定運轉,這就是電動機的制動問題。實現制動有兩種方法,機械制動和電磁製動。
電磁製動是使電機在制動時產生與其旋轉方向相反的電磁轉矩,其特點是制動轉矩大,操作控制方便。
現代通用電機的電磁製動類型有能耗制動、反接制動和回饋制動。
(1)電壓反接制動
電動機拖動恆轉矩負載運行。
通過反接閘刀把電源突然反接,同時在電樞支路串入限流電阻R,限制並消耗由於制動產生的大電流。
反接制動
如圖所示,工作點A→B→C,在C點時,n=0。這時應將電源切掉。在B→C的過程中轉速為正,電磁轉矩為負,起制動作用。
如果在C點時,電動機的轉矩大於負載轉矩(絕對值)而沒有切除電源,則電動機在電磁轉矩作用下將反向起動,作為反轉的電動機運行。如圖中的D點。
對於頻繁正反轉的電力拖動系統,常採用這種先反接制動停車,再反向起動的運行方式,達到迅速制動並反轉的目的。對於要求準確停車的系統,採用能耗制動較為方便。
(2)電勢反接制動(倒拉反轉運行)
他勵電動機拖動位能性恆轉矩負載運行。
電樞支路突然串入較大的電阻,則工作點A→B→C→D,D點位於第iv象限,轉速為負,電磁轉矩為正,屬於制動運行。
在C點后,負載轉矩大於電磁轉矩,轉速反向,感應電勢也反向,所以稱為電勢反接制動。
這種運行方式通常用在起重設備低速下放物體的場合。電動機的電磁轉矩起制動作用,限制了重物的下放速度。
三相非同步電機反接制動
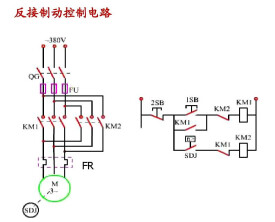
在電動機切斷正常運轉電源的同時改變電動機定子繞組的電源相序,使之有反轉趨勢而產生較大的制動力矩的方法。反接制動的實質:使電動機欲反轉而制動,因此當電動機的轉速接近零時,應立即切斷反接轉制動電源,否則電動機會反轉。實際控制中採用速度繼電器來自動切除制動電源。
反接制動
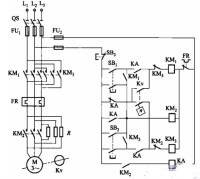
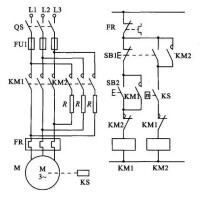
反接制動分析:停車時按下停止按鈕SB2,複合按鈕SB2的常閉先斷開切斷KM1線圈,KM1主、輔觸頭恢復無電狀態,結束正常運行並為反接制動作好準備,後接通KM2線圈(KV常開觸頭在正常運轉時已經閉合),其主觸頭閉合,電動機改變相序進入反接制動狀態,輔助觸頭閉合自鎖持續制動,當電動機的轉速下降到設定的釋放值時,KV觸頭釋放,切斷KM2線圈,反接制動結束。
一般地,速度繼電器的釋放值調整到90轉/分左右,如釋放值調整得太大,反接制動不充分;調整得太小,又不能及時斷開電源而造成短時反轉現象。
反接制動制動力強,制動迅速,控制電路簡單,設備投資少,但制動準確性差,制動過程中衝擊力強烈,易損壞傳動部件。因此適用於l0kw以下小容量的電動機制動要求迅速、系統慣性大,不經常啟動與制動的設備,如銑床、鏜床、中型車床等主軸的制動控制。
基本信息
- 方式
- 機械制動和電磁製動
- 中文名
- 反接制動
- 介紹
- 電動機拖動恆轉矩負載運行
- 性質
- 電機的一種制動方式