定軸輪系
定軸輪系
定軸輪系是指輪系運轉時,其各個齒輪的軸線相對於機架的位置都是固定的。定軸輪系又可以分為平面定軸輪系和空間定軸輪系。
由一系列齒輪組成的齒輪傳動系統稱為輪系。根據輪系中各軸線是否平行,可將輪系分為兩大類,即平面輪系和空間輪系。右圖(a)為平面輪系,各輪的軸線都是互相平行的,即全部由 圓柱齒輪組成的輪系;右圖(b)為空間輪系,輪系中至少有一個輪的軸線與其他輪的軸線不平行,即輪系中含有圓錐齒輪或蝸桿傳動。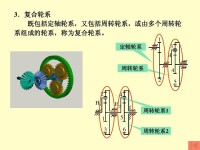
定軸輪系
根據輪系運轉時,其各個齒輪的軸線相對於機架的位置是否都是固定的,將輪系分為定軸輪系和周轉輪系兩大類。
在輪系中,輸入軸與輸出軸的角速度(或轉速)之比稱為輪系的傳動比。若輪系中首輪1的角速度為(轉速為),末輪k的角速度為(轉速為),輪系的傳動比用 表示,則另外,計算輪系的傳動比時,不僅要計算它的大小,還要確定兩軸的相對轉動方向(即輸入輪與輸出輪的轉向關係)。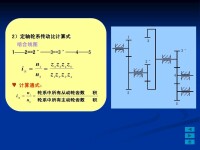
定軸輪系
傳動比大小的計算
為了計算輪系的傳動比,先來討論一對圓柱齒輪的傳動比。下圖(a)所示為一對外嚙合圓柱齒輪傳動,下圖(b)所示為一對內嚙合圓柱齒輪傳動。設輪1位主動輪,輪2為從動輪, 、分別為主、從動輪的角速度(轉速), 、為主、從動輪的齒數,表示主動輪1與從動輪2的傳動比。則考慮方向的傳動比公式為。
上式中等號右邊的“±”號表示兩圓柱齒輪的相對轉向。一對外嚙合圓柱齒輪傳動,兩輪轉向相反,取“-”號;一對內嚙合圓柱齒輪傳動,兩輪轉向相同,取“+”號。一對圓柱齒輪傳動的相對轉向也可用箭頭在齒輪傳動簡圖中直接標明。
以上結論可推廣到平面定軸輪系的傳動比計算。設輪1為主動輪,經過m次外嚙合,傳遞到最末的從動輪k,則平面定軸輪系始末兩輪傳動比數值計算的一般公式為式中,m表示在該輪系中外嚙合齒輪的對數。
2.始末兩輪轉向關係的確定
(1)平面定軸輪系始末兩輪轉向關係可由上式中的正負號來確定,為正值時,表示始末兩輪轉向相同;為負值時,表示始末兩輪轉向相反。
(2)平面定軸輪系各輪的相對轉向也可以通過逐對齒輪標註箭頭的方法來確定。
空間定軸輪系中包含圓錐齒輪傳動或蝸桿蝸輪傳動,如右圖所示。空間定軸輪系傳動比的大小仍可用平面定軸輪系傳動比公式計算,但因各軸線並不能都相互平行,故不能用 來確定主、從動輪的相對轉向,必須用畫箭頭的方法在圖上標註出。
一對平行軸外嚙合齒輪,其兩輪轉向相反,故用反向的箭頭表示。一對平行軸內嚙合齒輪,其兩輪轉向相同,故用同向的箭頭表示。一對圓錐齒輪嚙合傳動時,在節點具有相同的速度,故表示轉向的箭頭或同時指向節點或同時背離節點。蝸桿的轉向不僅與蝸桿的轉向有關,而且與蝸桿的旋向有關。