四象限,即第四象限,是指轉速與轉矩方向相反,電機處於發電狀態,即回饋制動。
運速軸示,
電磁轉矩方向。
磁轉矩軸示,轉速旋轉。
構坐標系,限轉,轉速轉矩旋轉,模式(假設轉)。
第二象限是電機正轉,但轉矩相反,電機處於發電狀態,即回饋制動。
第三象限是反轉電動,此時轉速與轉矩的方向相同,這是電動模式(反轉)。第四象限轉速與轉矩方向相反,電機處於發電狀態,即回饋制動。
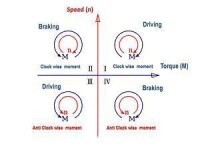
電機四象限運行圖
