共找到32條詞條名為羅蘭的結果 展開
- 中國香港女演員,代表作《借眼》
- 中國台灣作家
- 電視劇醜女無敵中人物
- ROLAND
- 《雷歐奧特曼》中的怪獸
- 導航及定位系統
- 羅蘭- 查理曼大帝時代第一的聖騎士
- 大洪山風景名勝區管委會主任
- 高級禮儀培訓師
- SNH48成員
- 中國鋼管舞第一人
- 巴中市中級人民法院副院長
- 動漫魔兵傳奇中人物
- 動漫《魔彈之王與戰姬》角色
- 1995年諾貝爾化學獎得主
- Fate系列登場的從者
- 火力少年王系列人物
- 白開水著奇幻小說
- 系列小說黑暗塔中的主人公
- 烏拉圭足球運動員
- 小說黑暗學徒中人物
- 延邊隊球員
- 小說死亡騎士中人物
- 國家稅務總局金華市稅務局第二稽查局團支部書記
- 動漫暗夜協奏曲中人物
- 洛克王國十大徽章守護者之一
- 京劇演員
- 香港美術家協會會員
- 經典RPG遊戲勇者斗惡龍2的主角
- 公司名稱
- 小說吾命騎士中人物
- 青島農業大學研究生導師
羅蘭
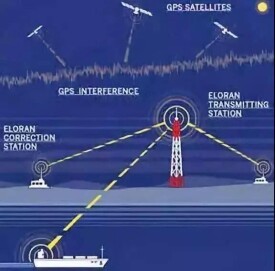
導航及定位系統
羅蘭導航系統 long range navigation (在導航領域通常簡稱“羅蘭”,即英文的Loran)是一種導航及定位系統,又稱“勞蘭”。
LORAN是遠程導航的縮寫,是在二戰期間在美國開發的雙曲線無線電導航系統。它類似於英國的Gee系統,但是在較低頻率下運行,以便提供高達1500英里(2,400公里)的距離,準確度為幾十英里。它首先用於穿過大西洋的艦隊,然後用於遠程巡邏機,但主要用於太平洋戰區的船舶和飛機。
原來LORAN是一種昂貴的系統,需要一個陰極射線管(CRT)顯示器。這對軍事和大型商業用戶的使用有限。而在20世紀50年代新的接收機可用的同時,同樣改進的電子產品也帶來了更高精度的新系統。美國海軍開始開發Loran-B,提供了幾十英尺的精度,但遇到了重大的技術問題。美國空軍處理了一個不同的概念,稱為“海倫”,海軍接管了羅蘭C。 Loran-C提供比LORAN更長的範圍和數百英尺的精度。 1958年,美國海岸警衛隊接管了這兩個系統的行動。
儘管Loran-C的表現大大提高,LORAN(現稱為Loran-A)(或“標準LORAN”)在此期間將會更受歡迎。這主要是由於海軍公布的大量剩餘的羅蘭A裝甲,因為船隻和飛機用Loran-C替代了它們的裝備。 20世紀80年代廣泛引入廉價的微電子技術,導致Loran-C接收機價格大幅下降,而Loran-A的使用開始迅速下降。從20世紀70年代開始,羅蘭A被拆除;直到一九九七年五月九日為止,日本的連鎖店一直保持在北美,中國的連鎖店在二零零零年開始活躍起來。
Loran-A使用與業餘無線電160米頻帶相同的頻率,無線電操作員在嚴格的規則下以較低的功率水平運行;根據他們的位置和到岸的距離,美國運營商在白天最多限制在200到500瓦,晚上則是50到200瓦。
1940年10月1日美國陸軍信號兵技術委員會會議,微波委員會主席Alfred Loomis提出建立雙曲線導航系統。他預測,這樣一個系統可以在200英里(320公里)的範圍內提供至少1,000英尺(300米)的精度,高飛機的最大距離可達300-500英里(480-800公里) 。這導致了“引導飛機精密導航設備”規範,被送回微波委員會,形成“3號”。初次系統訂單在後續會議上發出1940年12月20日,第一架機載雷達系統的開發人員愛德華·喬治·鮑恩(Edward George Bowen)也在12月20日的會議上表示,他知道在英國有類似的工作,但是不了解它提供任何建議。
項目3在1941年搬遷到新成立的輻射實驗室的導航小組。早期系統運行在大約30 MHz,但後來決定嘗試使用不同的設備,可以從3 MHz調諧到8 MHz。發現這些較低頻率系統的電子性能更加穩定。在首先考慮在山峰上設置變送器后,該小組反而在紐約蒙圖克角和特拉華州的芬威克島兩個廢棄的海岸警衛隊駐紮。在接收端,一輛貨車裝有一個簡單的接收器,並在全國各地發送尋找固體信號,這些信號遠離密蘇里州的斯普林菲爾德。
對於生產系統,團隊開始使用一個使用圓形J型顯示屏的系統來提高精度。J範圍提供時間差異,不像管中的線性位移,如在更常見的A範圍內,而是作為陰極射線管面部周圍的角度。對於給定的顯示尺寸,時間差異可以用更長的長度(由因子π表示),從而提高準確度。儘管使用了J-scope,採用頻率變化更加穩定,團隊發現準確的距離測量非常困難。當時,產生尖銳的信號脈衝的程序還處於起步階段,它們的信號在時間上有了很大的擴展,難以進行測量。
在這個時候,該團隊已經意識到英國的“Gee”努力,並且意識到Gee使用了一種電子生成的閃光燈系統,它們在顯示屏上產生與系統時序準確一致的點數。他們派了一個團隊去英國學習頻閃概念,並立即採用它的工作。但是作為這次交流的一部分,項目3團隊發現Gee在概念上和所期望的表現上幾乎與自己的系統完全相同。與他們的系統不同,Gee在很大程度上完成了開發,並且正在進行生產。決定放棄目前的努力,將Gee用在自己的飛機上,並重新開發他們的系統作為遠程角色。
切換到遠程角色的決定意味著不需要Gee系統的高精度,這大大減少了解決時序問題的需要。這種目的的改變也要求使用較低的頻率,這可以在夜間反射電離層,從而提供超視距的操作。最初選擇兩個頻段,夜間使用1.85和1.95 MHz(160米)和7.5 MHz(40米)。早期接收器上標記為“HF”的7.5 MHz從未在工作中使用。
在1942年中期,電訊研究機構(TRE)Gee系統的首席開發人員羅伯特·皮皮(Robert Dippy)被派往美國工作了八個月,幫助LORAN發展。當時這個項目主要是由美國海軍上尉哈丁主持,他們完全集中在船上。 Dippy說服他們,空降版絕對是可能的,導致美軍空軍的興趣。海軍對這一輪事件不滿意。 Dippy還提出了一些在實踐中將非常有用的簡單變化。其中,他直接要求機載LORAN接收機在物理上類似於Gee接收機,從而可以通過更換接收機單元將其換成服務。這將證明非常有用;澳大利亞運輸司令部的飛機可以在往返澳大利亞的劇院時交換接收機。 Dippy還設計了地面站定時設備。
在這個時候,這個項目是由美國海岸警衛隊和加拿大皇家海軍加入的。這個項目目前仍然是最大的秘 密,而且很少有實際的信息,特別是與海岸警衛隊。加拿大聯絡是必需的,因為這些駐地的理想選址將需要加拿大海上省份的不同地點的幾個車站。新斯科舍省的一個地點被證明是一場戰鬥;這個網站是由一位漁夫擁有的,他的霸氣絕倫的妻子死了,與有罪的海軍男子有任何關係。當J.A.的選址委員會Waldschmitt和Lt. Cdmr。阿列耶夫與丈夫討論這個問題,第三名訪客抵達,他提供男子捲煙。他們拒絕了,女主人問他們是否喝酒。當他們說,他們沒有,土地被迅速固定。
在太平洋戰爭期間,太平洋的巨大距離和缺乏有用的導航點導致了LORAN在船舶和飛機上的廣泛使用。特別是LORAN所提供的準確性使得飛機能夠減少額外的燃料,否則這些燃料將會在長時間的使命中找到自己的基礎。這樣減少的燃料負荷使得可以增加炸彈載荷。第二次世界大戰結束時,共有72個LORAN電台,使用了75,000多台接收器。
戰後時期增加了太平洋的附加鏈條。韓國戰爭開幕之後,在日本的新連鎖店,韓國釜山的連鎖店也出現了突破。中國共產主義革命最終結束之前,中國還安裝了鏈條,至少在上個世紀九十年代,這些台站一直保持著空氣。 1965年,葡萄牙和亞速爾群島的最後一次重大擴張事件就是向大西洋中部地區提供額外的覆蓋。
在LORAN天空的早期實驗中,傑克·皮爾斯(Jack Pierce)注意到,晚上電離層的反射層相當穩定。這導致兩個LORAN站可以使用天波信號進行同步,至少在晚上,允許它們在更遠的距離上分離。雙曲線系統的準確度是基線距離的函數,因此如果站點可以擴展,系統將變得更加準確,因此需要更少的站點。
1943年4月10日,在距離1,100英里(1800公里)的Fenwick的LORAN車站和Bonavista之間首先嘗試了一個測試系統。該測試顯示了1/2英里的精度,明顯優於正常LORAN。這導致了1943年末的第二輪測試,這次使用了四個站點,蒙托克,東布魯斯特,馬薩諸塞州的鵝莓瀑布,佛羅里達州基韋斯特。廣泛的評估航班顯示平均誤差為1-2英里(1.6-3.2公里)。
夜間操作模式非常適合RAF轟炸機司令部。四個測試站被拆除並運往大西洋,並重新安裝形成兩條連鎖店,即阿伯丁比茲塔和奧蘭加班齊。被稱為Skywave同步的LORAN或SS LORAN,該系統提供覆蓋蘇格蘭南部和波蘭東部的平均精度為1英里的覆蓋範圍。該系統於1944年10月開始運行,到1945年被普遍安裝在第五集團RAF。
海岸警衛隊在被稱為“Skywave Long Baseline LORAN”的系統中也測試了同樣的基本概念。唯一的區別是選擇不同頻率,當天為10.585 MHz,夜間為2 MHz。初步測試於1944年5月在佛羅里達州查塔姆市與佛羅里達州費爾南迪納市進行,第二批在佛羅里達州霍比灣和波多黎各Point Chinato於1945 - 1月19日至1946年間進行。由於缺乏適當的頻率分配,該系統未投入運行。
LORAN是一個比較脈衝到達時間進行測量的簡單系統。理想情況下,CRT上將顯示出完美形狀的矩形閃光,其前沿可與精度進行比較。在實踐中,發射機不能立即打開和關閉,並且由於各種因素,所得到的藍光在時間上擴散。除此之外,所得到的blip的形狀,包絡取決於系統的頻率,這意味著像LORAN這樣的低頻系統通常具有比像Gee這樣的高頻率的精度更低的精度。
完成相同的時序測量有完全不同的方法,而不是通過比較脈衝包絡的時序,而是對信號的相位進行定時。這在電子學中實際上很容易做到,並且可以使用簡單的機械指針直接顯示。這樣一個系統的訣竅是確保主站和從站是相位一致的,這是第二次世界大戰期間昂貴而複雜的主張。但是,通過在幾個廣播電台隔離系統的昂貴部分,使用這種技術的Decca導航系統在1944年開始運行,提供了與Gee類似的精度,但是使用也更容易使用的低成本機械顯示器。
相位比較系統的缺點是,不可能從連續的波信號(如Decca)中知道您正在測量的信號部分。您可以將一個站點的第一個波形與另一個站點的第一個波形進行比較,但第二個波形看起來是相同的。這導致操作員可以產生精確測量的問題,但實際的修復可能在各種各樣的位置。 Decca將這些稱為“通道”,並使用機械系統來跟蹤它們。
通過結合這兩個概念,可以消除這兩個問題。由於相位比較在低頻下通常更為準確,因此採用這種技術可以獲得準確的定位。但是,與Decca的情況一樣,不是廣播連續的信號,信號將是脈衝的形式。這些將用於使用與Gee或LORAN相同的技術進行粗略的修正,積極地識別車道,然後使用相位比較進行更準確的測量。從開發的角度來看,唯一的問題是選擇允許相當精確的脈衝信封的頻率,同時在脈衝中仍然具有可測量的波形,以及顯影能夠顯示兩個脈衝作為整體,以及其中的波形。
這些概念在1945年導致了低頻LORAN的實驗,使用了更低的頻率,180 kHz。在美國東海岸,使用氣球支持的長天線,建立了一個具有三個發射器的系統。實驗表明,在這樣低的頻率下工作時,設計固有的不精確性太大而無法有效;操作因素引入了壓倒能力的錯誤。然而,這三台發射機在加拿大北部和阿拉斯加北部重新安裝了極地導航實驗,並運行了三年,直到1950年3月再次關閉。這些實驗證明了精確度為0.15微秒,即約50米(0.031英里),遠遠超過LORAN。最大可用範圍是在陸地上1000英里(1600公里),海上1500英里(2,400公里)。使用循環匹配,該系統在750英里(1,210公里)處顯示出160英尺(49米)的精度。但是也發現系統使用非常困難,測量結果仍然會混淆在哪些周期上匹配。
在同一時期,美軍陸戰隊空軍對一個非常高的精確度系統感興趣,炸彈瞄準目標。 Raytheon贏得了開發一個名為Cytac的系統的合同,該系統使用與LF LORAN相同的基本技術,但包括相當大的自動化程度來處理內部的時序,無需操作人員的干預。這被證明是非常成功的,試飛將飛機放在目標的10碼範圍內。隨著飛行任務從短距離的戰術轟炸轉變為極端核交付,(新形成的)美國空軍對這一概念失去了興趣。然而,他們繼續對設備進行實驗,在LF LORAN頻率上工作,並將其重新命名為Cyclan,與原始設備相比降低了精度,但在大幅度增加的距離上提供了一英里的精確度。
海軍在此期間也一直在嘗試一個類似的概念,但採用不同的方法來提取時間。這個系統後來被稱為Loran-B,遇到了很大的問題(與另一個空軍系統Whyn一樣) 1953年,海軍接管了Cyclan系統,開始了一系列廣泛的研究,遠遠超過巴西,證明了精度。
儘管Loran-C的準確性和易用性大大增加,Loran-A仍然廣泛使用。這主要是由於兩個重要因素。一個是電子學需要閱讀Loran-C信號是複雜的,在管子電子學的時代,物理上非常大,通常是脆弱的,而且昂貴。此外,隨著軍艦和飛機從羅蘭A轉到羅蘭C,老年人的接收人已經過剩了。這些老年單位被商業漁民和其他用戶搶走,保持廣泛的服務。
引入晶體管無線電,然後直接解碼位置的基於微控制器的系統在價格下降的同時繼續改進洛蘭A系統。到20世紀70年代初,這些單位相對比較普遍,雖然與無線電測向儀等設備相比,它們仍然比較昂貴。但是在這個時期,電子產品的進步是如此迅速,只有幾年之前,Loran-C相同規模和成本的單位都可以使用。這導致1974年決定將羅蘭C開放給民用。
到20世紀70年代後期,海岸警衛隊正在逐步淘汰羅蘭A,贊成增加羅蘭C鏈。阿留申和夏威夷鏈條於1979年7月1日關閉,其餘是阿拉斯加和西海岸,1979年12月31日,其次是大西洋和加勒比海發射機,於1980年12月31日關閉。太平洋和大西洋的幾條外國鏈都跟隨著,到1985年,大多數原始的鏈條已經不再運作。直到1991年,日本的系統仍然停留在空中,為他們的漁船隊服務。中國的系統在20世紀90年代以前就被更新了現代系統,而其9個鏈仍然被列為“無線電信號海難金額冊”第6卷(2000版)。
雙曲線導航系統可以分為兩個主要類別,即計算兩個無線電脈衝之間的時間差的那些,以及兩個連續信號之間的相位差的比較。這裡我們將僅考慮脈衝方法。
考慮距離彼此距離300公里(190 mi)的兩個無線電發射機,這意味著來自一個的無線電信號將需要1毫秒來到達另一個。這些站中的一個配備有周期性地發出觸發信號的電子時鐘。當發送信號時,本台“主”發出信號。 1 ms后,信號到達第二站,即“從站”。該站配有接收器,當它看到來自主機的信號到達時,它觸發自己的發射器。這樣可以確保主機和從機之間精確地發送1 ms信號,而無需自己準備一個精確的定時器。實際上,增加了固定的時間來解決電子設備的延誤。
聆聽這些信號並在示波器上顯示這些信號的接收器將在顯示屏上看到一系列的閃爍。通過測量它們之間的距離,可以計算兩個信號之間的延遲。例如,接收機可以測量兩次抖動之間的距離,以表示0.5ms的延遲。這意味著到兩站的距離差距是150公里。在這種情況下,可以測量這個延遲的無數個位置 - 距離一個站點75公里,另一個站點225公里,距離一個站點300個,距離另一個300公里的距離150公里。
當在圖表上繪製時,任何給定時間差的可能位置的集合形成雙曲線。所有可能的測量延遲的曲線集合形成一組彎曲的輻射線,以兩個站之間的線為中心,稱為“基線”。為了進行修復,接收機根據兩個不同的站進行兩次測量。兩組曲線的交點通常產生兩個可能的位置。使用某種其他形式的導航,例如航位推算,可以消除這些可能位置中的一個,從而提供一個確切的解決方案。
LORAN塔站成對建成,一個主人和一個奴隸,通常分開約600英里(970公里)。每一對在四個頻率1.75,1.85,1.9或1.95 MHz(以及未使用的7.5 MHz)中的一個頻率上進行廣播。在任何給定的位置,一次可以接收三個以上的電台,因此需要一些識別對的方法。 LORAN採用了改變脈衝重複頻率(PRF)的任務,每個站發送一串40個脈衝,每秒33.3或25個脈衝。LORAN塔站於1963年建立在沙約翰斯頓島。
使用簡單的代碼識別站,數字錶示頻帶,脈衝重複頻率的字母和鏈中的站的號碼。例如,夏威夷群島的三個電台被安排為兩對2L 0和2L 1.這表明它們在通道2(1.85 MHz)上,使用“L”的重複頻率(25個循環),而兩個的站是基地重複率,而另外兩個(主站和第三站)使用重複率1. PRF可以從25到25和7/16位調整為低,33 1/3到34 1/9為高。這個系統共享了在兩個頻率上廣播的中間塔。
在Gee的情況下,信號直接從發射機到接收機,產生一個易於解釋的乾淨信號。如果顯示在單個CRT軌跡上,操作員將看到一串尖銳的“blips”,首先是主機,然後是其中一個從機,主機,然後是另一個從機。 Gee CRT被構建為能夠顯示兩個跡線,並且通過調整伺服器延遲電路,操作者可以使第一個主從信號出現在上顯示器上,第二個在下。他們可以同時對兩者進行測量。
相比之下,LORAN是故意設計的,可以使用天空波,所得到的信號要複雜得多。地面波保持相當銳利,但只能在較短的距離接收,主要在白天使用。在晚上,從單個發射機可能接收到多達三十個不同的天空,通常在時間上重疊,產生複雜的返回模式。由於該模式取決於發射機和接收機之間的大氣,兩個站的接收模式不同。同一時間可能會從一個電台收到一個雙反彈的天波,而另一個則是三彈反彈,從而使顯示的解釋變得非常困難。
雖然LORAN故意使用與Gee相同的顯示器,但信號比Gee長得多,更複雜,直接測量兩個信號是不可能的。即使來自主站的初始信號在時間上分散,初始地面波信號如果被接收,則天空接收可能出現在顯示器的任何位置。因此,LORAN操作者改為設置延遲,使得主信號出現在一個跟蹤上,而從機在第二個信號上出現,從而允許比較複雜的圖形。這意味著只能一次進行主/從測量;為了產生“修復”,必須使用不同的站組來重複整個測量過程。測量時間為3至5分鐘,是典型的,需要導航員在此期間考慮車輛的運動。
原來的機載接收機是1943年的AN / APN-4機組,與英國的兩件式Gee機身完全相同,可以輕鬆與這些機組互換。顯示器的主機還安裝了大多數控制項。一般操作從9個站之一開始,標記為0到8,並將掃描速度設置為1,最低設置。然後,操作者將使用強度和聚焦控制來微調信號並提供清晰的顯示。
在最低的掃描速度下,系統還產生了一個送入顯示器的本地信號,產生了一個清晰定義的“基座”,沿著兩條軌跡顯示出一個矩形。來自電台的放大信號也將出現在顯示器上,並在時間上高度壓縮,使其顯示為一系列尖峰(閃爍)。隨著信號的重複,這些尖峰在顯示器的寬度上出現了很多次。因為顯示被設置為以選定的電台對的脈衝重複頻率進行掃描,所以該區域中不同重複頻率的其他電台將在顯示器上移動,而所選擇的電台將保持靜止。
使用“左右”開關,操作者將移動上基座,直到其中一個信號尖峰位於其中心,然後使用粗略和精細的延遲控制將基座移動到下部軌跡上以居中。一旦完成,系統設置為掃描速度2,這加快了軌跡,使得由基座概述的部分填滿了整個軌跡。以掃描速度3重複該過程,此時在屏幕上只有信號的選定部分可見。轉向掃描速度4沒有改變時序,而是將信號疊加在一條跡線上,以便最終調諧可以使用增益和放大器平衡控制。目標是完美地對準兩條痕迹。
此時測量開始。操作員切換到掃描速度5,返回到具有兩條獨立跡線的顯示器,信號反轉並以較低的掃描速度運行,從而在跡線上出現多次重複信號。混合在信號中的是在時基發生器中產生的電子秤,導致一系列小點出現在現在反轉的原始信號上。在5個設置中,刻度上的點表示10微秒的差異,操作員測量位置之間的距離。在50微秒時重複設置6,再次以500微秒設置7。然後將這些設置中的每一個測量的差值相加,以產生兩個信號之間的總延遲。然後,對於第二主從設備重複該整個過程,通常是相同鏈路的第二組,但不總是。
接收機單元隨著時間的推移而大大改善。 AN / APN-4被1945年的AN / APN-9快速取代,這是一個綜合收音機和顯示重量減輕的一體機。
白天,電離層只能弱反射短波信號,LORAN可以使用地面波500-700海里(930-1,300公里)。晚上,這些信號被抑制,範圍降至350-500海里(650-930公里)。在晚上,天空對測量有用,將有效範圍擴展到1,200-1,400海里(2,200-2,600公里)。
在長距離範圍內,雙曲線近似從基線中心輻射的直線。當考慮來自單個鏈路的兩個這樣的信號時,與該範圍相比,所產生的線路圖形變得越來越平行,因為基線距離變小。因此,在短距離處,線以接近90度的角度交叉,並且該角度隨著範圍而穩定地減小。由於固定的精度取決於交叉角度,並且所有雙曲線導航系統隨著距離的增加越來越不準確。
此外,複雜的一系列接收到的信號使LORAN信號的讀取困難,需要一些解釋。準確度更多是信號質量和操作員體驗的問題,而不是設備或信號的任何基本限制。表達準確性的唯一方法是在實踐中進行測量;從日本到天寧島的航線的平均精度為1,400英里(2300公里),為28英里(45公里),為2%。
AT LORAN是“Air Transportable”,它是一款輕便的LORAN發射機,可以在前輪移動時快速設置。操作與“正常”LORAN相同,但通常假設圖表不可用,必須在現場準備。移動LORAN是另一個輕型系統,安裝在卡車上。
基本信息
- 中文名
- 羅蘭
- 外文名
- long range navigation
- 系統類型
- 導航及定位系統
- 基本參數
- 作用距離、工作區、定位準確度
- 英文簡稱
- Loran
- 分類
- 羅蘭A、羅蘭B、羅蘭C等
- 屬性
- 導航及定位系統