自適應巡航
一種智能化的自動控制系統
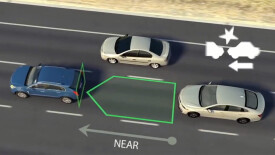
自適應巡航控制系統是一種智能化的自動控制系統,它是在早已存在的巡航控制技術的基礎上發展而來的。在車輛行駛過程中,安裝在車輛前部的車距感測器(雷達)持續掃描車輛前方道路,同時輪速感測器採集車速信號。
當與前車之間的距離過小時,ACC控制單元可以通過與制動防抱死系統、發動機控制系統協調動作,使車輪適當制動,並使發動機的輸出功率下降,以使車輛與前方車輛始終保持安全距離。
自適應巡航系統主要由自適應巡航控制系統感測器、自適應巡航控制系統控制器、發動機管理控制器、電子節氣門執行器、制動執行器(例如ABS/ESP等)組成。
自適應巡航也可稱為主動巡航,類似於傳統的定速巡航控制,該系統包括雷達感測器、數字信號處理器和控制模塊。在自適應巡航系統中,系統利用低功率雷達或紅外線光束得到前車的確切位置,如果發現前車減速或監測到新目標,系統就會發送執行信號給發動機或制動系統來降低車速,從而使車輛和前車保持一個安全的行駛距離。當前方道路障礙清除后又會加速恢復到設定的車速,雷達系統會自動監測下一個目標。主動巡航控制系統代替司機控制車速,避免了頻繁取消和設定巡航控制。自適應巡航系統適合於多種路況,為駕駛者提供了一種更輕鬆的駕駛方式。
自適應巡航控制(ACC)是一個允許車輛巡航控制系統通過調整速度以適應交通狀況的汽車功能。安裝在車輛前方的雷達用於檢測在本車前進道路上是否存在速度更慢的車輛。若存在速度更慢的車輛,ACC系統會降低車速並控制與前方車輛的間隙或時間間隙。若系統檢測到前方車輛並不在本車行駛道路上時將加快本車速度使之回到之前所設定的速度。此操作實現了在無司機干預下的自主減速或加速。ACC控制車速的主要方式是通過發動機油門控制和適當的制動。
當同一條車道前方沒有車輛時,像通常的巡航控制一樣按照設定的車速行駛;當前方出現車輛時,以低於設定車速行駛,控制本車與前方車輛的合理間距。四種典型的功能:
(l)當前方無車輛時,ACC車輛將處於普通的巡航駕駛狀態,按照駕駛
員設定的車速行駛,駕駛員只需要進行方向的控制(勻速控制)
(2)當ACC車輛前方出現目標車輛時,如果目標車輛的速度小於ACC車輛
時,ACC車輛將自動開始進行減速控制,確保兩車的距離為所設定的安全距離
(3)當兩車之間的距離等於安全車距后,採取跟隨控制,即與目標車輛以相
同的車速行駛。
(4)當前方的目標車輛發生移線,或主車移線行駛使得主車前方又無行駛車輛時,ACC系統將對主車進行加速控制,使主車恢復至設定的行駛速度。
自適應巡航控制系統的最大優點在於不僅能夠保持駕駛人預先設定的車速,還能夠在特定駕駛條件下隨時根據需要降低車速,甚至自動制動。
當車速超過30公里/小時,無論駕駛人正以何種方式駕駛車輛,自適應巡航控制系統均會介入工作,以使車輛始終保持駕駛人預先設定的車速。為此,系統要麼自動提高發動機動力,要麼降低發動機動力並使變速器降檔,以利用發動機制動降低車速。在某些情況下(例如下坡行駛或拖車時),如果上述措施不足以使車速降低到預定值,系統還將使制動系統進行干預。
(1)通過車距感測器的反饋信號,ACC控制單元可以根據靠近車輛物體的移動速度判斷道路情況,並控制車輛的行駛狀態;通過反饋式加速踏板感知的駕駛者施加在踏板上的力,ACC控制單元可以決定是否執行巡航控制,以減輕駕駛者的疲勞。
自適應巡航
(2)自適應巡航控制系統一般在車速大於25 km/h時才會起作用,而當車速降低到25 km/h以下時,就需要駕駛者進行人工控制。通過系統軟體的升級,自適應巡航控制系統可以實現“停車/起步”功能,以應對在城市中行駛時頻繁的停車和起步情況。