輪速感測器
分為主動、被動兩種基本形式
徠輪速感測器是用來測量汽車車輪轉速的感測器。對於現代汽車而言,輪速信息是必不可少的,汽車動態控制系統(VDC)、汽車電子穩定程序(ESP)、防抱死制動系統(ABS)、自動變速器的控制系統等都需要輪速信息。所以輪速感測器是現代汽車中最為關鍵的感測器之一。
現代汽車的ABS系統中都設置有電磁感應式的輪速感測器,它可以安裝在主減速器或變速器中,輪速感測器的組成和工作原理如圖所示。它是由永久磁鐵、磁極、線圈和齒圈組成。齒圈5在磁場中旋轉時,齒圈齒頂和電極之間的間隙就以一定的速度變化,則使磁路中的磁阻發生變化。其結果是使磁通量周期地增減,在線圈1的兩端產生正比於磁通量增減速度的感應電壓,並將該交流電壓信號輸送給電子控制器。
1-線圈;2-磁鐵;3磁極;4-磁通;5-齒圈
現代汽車的ABS系統中都設置有電磁感應式的輪速感測器,它可以安裝在主減速器或變速器中,輪速感測器的組成和工作原理如圖所示。它是由永久磁鐵、磁極、線圈和齒圈組成。齒圈5在磁場中旋轉時,齒圈齒頂和電極之間的間隙就以一定的速度變化,則使磁路中的磁阻發生變化。其結果是使磁通量周期地增減,在線圈1的兩端產生正比於磁通量增減速度的感應電壓,並將該交流電壓信號輸送給電子控制器。
輪速感測器的種類及其檢測:
電磁感應式車速感測器安裝在自動變速器輸出軸附近的殼體上,用於檢測自動變速器輸出軸的轉速。電控單元ECU根據車速感測器的信號計算車速,作為換擋控制的依據。車速感測器由永久磁鐵和電磁感應線圈組成,它被固定安裝在白動變速器輸出軸附近的殼體上,輸出軸上的停車鎖定齒輪為感應轉子,當輸出軸轉動時,停車鎖定齒輪的凸齒,不斷地靠近或離開車速感測器,使線圈內的磁通量發生變化,從而產生交流電,車速越高,輸出軸轉速也越高,感應電壓脈衝頻率也越高,電控組件根據感應電壓脈衝的大小計算汽車行駛的速度。用萬用表測導通,阻值還有有沒有電壓信號。
在汽車應用中是十分特殊的,這主要是由於變速器周圍空間位置衝突霍爾效應感測器是固體感測器,它們主要應用在曲軸轉角和凸輪軸位置上,用於開關點火和燃油噴射電路觸發,它還應用在其它需要控制轉動部件的位置和速度控制電腦電路中。霍爾效應感測器或開關,由一個幾乎完全閉合的包含永久磁鐵和磁極部分的磁路組成,一個軟磁鐵葉片轉子穿過磁鐵和磁極間的氣隙,在葉片轉子上的窗口允許磁場不受影響的穿過併到達霍爾效應感測器,而沒有窗口的部分則中斷磁場,因此,葉片轉子窗口的作用是開關磁場,使霍爾效應象開關一樣地打開或關閉,這就是一些汽車廠商將霍爾效應感測器和其它類似電子設備稱為霍爾開關的原因,該組件實際上是一個開關設備,而它的關鍵功能部件是霍爾效應感測器。測試步驟將驅動輪頂起模擬行使狀態,也可以將汽車示波測試線加長進行行駛的測試。波形結果當車輪開始轉動時,霍爾效應感測器開始產生一連串的信號,脈衝的個數將隨著車速增加而增加,與圖例相像,這是大約30英里/小時時記錄的,車速感測器的脈衝信號頻率將隨車速的增加而增加,但位置的占空比在任何速度下保持恆定不變。車速感測器越高,在示波器上的波形脈衝也就越多。確認從一個脈衝到另一個脈衝的幅度,頻率和形狀是一致的,這就是說幅度夠大通常等於感測器的供電電壓,兩脈衝間隔一致,形狀一致,且與預期的相同。確定波形的頻率與車速同步,並且占空比決無變化,還要觀察如下內容:觀察波形的一致性,檢查波形頂部和底部尖角。觀察幅度的一致性:波形高度應相等,因為給感測器的供電電壓是不變的。有些實例表明波形底部或頂部有缺口或不規則。這裡關鍵是波形的穩定性不變,若波形對地電位過高,則說明電阻過大或感測器接地不良。觀察由行駛性能問題的產生和故障碼出現而誘發的波形異常,這樣可以確定與顧客反映的故障或行駛性能故障產生的根本原因直接有關信號問題。雖然霍爾效應感測器一般設計能在高至150℃溫度下運行,但它們的工作仍然會受到溫度的影響,許多霍爾效應感測器在一定的溫度下(冷或熱)會失效。如果示波器顯示波形不正常,檢查被干擾的線或連接不良的線束,檢查示波器和連線,並確定有關部件轉動正常(如:輸出軸、感測器轉軸等)。當示波器顯示故障時,搖動線束,這可以提供進一步判斷,以確認霍爾效應感測器是否是故障的根本原因。
光電式車速感測器是固態的光電半導體感測器,它由帶孔的轉盤兩個光導體纖維,一個發光二極體,一個作為光感測器的光電三極體組成。一個以光電三極體為基礎的放大器為發動機控制電腦或點火模塊提供足夠功率的信號,光電三極體和放大器產生數字輸出信號(開關脈衝)。發光二極體透過轉盤上的孔照到光電三極體上實現光的傳遞與接收。轉盤上間斷的孔可以開閉照射到光電三極體上的光源,進而觸發光電三極體和放大器,使之像開關一樣地打開或關閉輸出信號。從示波器上觀察光電式車速感測器輸出波形的方法與霍爾式車速感測器完全一樣,只是光電感測器有一個弱點即它們對油或臟物在光通過轉盤傳遞的干涉十分敏感,所以光電感測器的功能元件通常被設計成密封得十分好,但損壞的分電器或密封墊容器在使用中會使油或贓物進入敏感區域,這會引起行駛性能問題併產生故障碼。
光電式車速感測器檢測時拔下車速感測器連接器接頭用萬用表測量感測器兩接線端子間電阻。不同車型自動變速器的這種車速感測器感應線圈的電阻值不同,一般為幾百歐到幾千歐。將車支起,用手轉動懸空的驅動車輪,同時用萬用表測量車速感測器的兩接線端子間有無脈衝感應電壓。若萬用表指針有擺動,說明感測器有輸出脈衝電壓,感測器工作正常;否則,說明感測器有故障,應進一步檢查感測器轉子及感應線圈是否臟污,若臟污,應進行清潔,再進行測試。若感測器仍無脈衝電壓產生,確認感測器已經損壞,應進行更換。車速感測器脈衝電壓測量。單件檢測。拆下車速感測器,測量感測器輸出脈衝電壓。具體操作是,用一根鐵棒或一塊磁鐵迅速靠近或者離開感測器,同時用萬用表測量感測器兩接線端子間有無脈衝電壓產生。如果沒有感應電壓或感應電壓很微弱,說明感測器有故障,應進一步檢查,再試驗,確認有故障后,再進行更換
可變磁阻式車速感測器主要由磁阻元件、轉子、印刷電路板和磁環等組成。可變磁阻式車速感測器的工作原理,當齒輪帶動感測器軸旋轉時,與軸連在一起的多級磁環也同時旋轉,磁環旋轉引起磁通的變化,是集成電路內的磁阻元件的電阻值也發生變化。當流向磁阻元件MRE的電流方向與磁力線方向平行時,其電阻值最大;電流方向與磁力線方向垂直時,其電阻值最小.在磁環上N極與S極交替排列,隨著磁環的迴轉使其磁力線方向不斷的變換,伴隨每一迴轉,在內置磁阻元件(MRE)的集成電路(IC)中發出20個脈衝信號,該信號即車速信號,送入速度表。磁通量的變化與磁環轉速成正比,這樣可以利用磁阻元件電阻值的變化檢測出磁環旋轉引起的磁通變化,將電壓的變化輸入到比較器中進行比較,再由比較器輸出的信號控制晶體管的導通和截止,這樣就可以檢測出車速。
可變磁阻式車速感測器在檢測時,可用手轉動感測器軸,在轉動的同時,用萬用表測量感測器兩端子間輸出的電壓信號,若有脈衝電壓信號輸出,說明感測器良好,若無脈衝信號產生,則說明感測器已經損壞,應當更換.
技術領域
該系統是用於汽車防抱制動過程中輪速感測器的檢測。為保證ABS系統的正常工作,獲取車輛運行的參數,需要有合格的輪速感測器。本系統用輪速感測器檢測裝置,將信號通過A/D轉換,描繪出曲線,並根據數據確定輪速感測器是否合格。
輪速感測器是汽車防抱制動系統中獲取車輛運行參數的關鍵器件,為保證汽車防抱制動系統的正常工作,保證汽車運行的安全,輪速感測器是一個重要的部件。
汽車ABS所用的輪速感測器為電磁感應方式,產生出接近正弦波的波形,過去的檢測方式是用示波器查看波形和頻率,檢測比較麻煩,難以確保產品質量。我們採用將輪速感測器與齒圈轉動產生的電信號,通過A/D轉換成數據,通過計算機將信號曲線描繪出來,並根據採集的數據計算出周期和頻率,通過峰值數據給出輪速感測器是否合格的判定。
該系統是通過輪速感測器檢測裝置,將齒圈轉動產生的電信號,通過A/D轉換成數據,通過計算機將信號曲線描繪出來,並根據採集的數據計算出周期和頻率,通過峰值數據給出輪速感測器是否合格的判定。
該系統有如下一些的特點:
第一,輪速感測器檢測裝置用於檢測不同的輪速感測器時的固定和定位;可以通過旋轉裝置調整輪速感測器與齒圈的距離。信號由A/D模塊傳送到PC,再由PC的檢測軟體顯示曲線和數據。
第二,輪速感測器的參數確定:根據輪速感測器的使用(氣壓、液壓)確定齒圈的齒數,並根據齒數確定齒圈的轉動頻率,調整電壓確定齒圈的轉動頻率。最後根據峰值電壓確定輪速感測器是否合格。
第三,增加了【展寬】和【縮小】功能。
【展寬】和【縮小】功能是為了便於對曲線進行細緻的分析。每按下一次【展寬】鍵,時間數據就縮小一半,多次按下時可以展寬到0.1s,便於分析採集的數據曲線。
第四,【保存】功能:是用於輪速感測器檢測中對數據的存儲功能,可以事後對曲線進行分析時使用。
該系統由計算機、輪速感測器檢測裝置和可調直流穩壓電源等構成。啟動輪速感測器檢測軟體后如圖1所示,初始參數齒圈為100齒,文件名為“S××××××”,××××××是系統的年月日,為初始文件名,用戶也可以輸入自己定義的文件名。根據所檢測的輪速感測器的用途修改齒圈齒數的值(100或48);打開可調直流穩壓電源,至此初始準備工作就完成了。按下【檢測】鍵檢測就開始了,這時應調整可調直流穩壓電源的電壓,使齒圈的旋轉頻率滿足輪速感測器的檢測要求,至此檢測開始了。同時【檢測】鍵變成【停止】鍵,可以隨時停止檢測工作。便於保存或分析數據(用【展寬】鍵查看曲線)。檢測是連續的,可以提高檢測效率。
附圖2為齒圈齒數為48齒時輪速感測器的檢測曲線,附圖3為附圖2曲線的展寬方式;附圖4為齒圈齒數為100齒時輪速感測器的檢測曲線,附圖5為附圖4曲線的展寬方式;附圖6為輪速感測器檢測不合格的曲線。合格產品的判定為綠色的“合格”;不合格產品的判定為紅色的“不合格”。
(1)結構
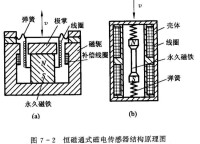
圖3 磁電式輪速感測器安裝圖
汽車車輪轉速感測器通常安裝在車輪處,但在有些車型上則設置在主減速器或變速器中。
極軸根據形狀的不同分為鑿式、柱式、菱形三種類型,如下圖所示。不同形狀的感測頭相對於齒圈的安裝方式也不同。菱形極軸車速感測器頭一般徑向垂直於齒圈安裝;鑿式極軸車速感測器頭軸向相切於齒圈安裝;柱式極軸車速感測器頭軸向垂直於齒圈安裝。安裝時應牢固,為避免水、灰塵對感測器工作的影響,在安裝前須將感測器加註潤滑脂。
(2)原理
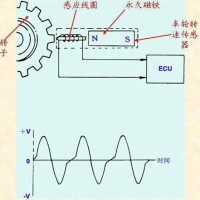
圖5 磁電式輪速感測器原理
(1)結構
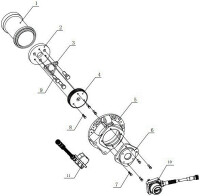
圖6 霍爾式輪速感測器結構
(2)原理
霍爾式輪速感測器利用霍爾效應原理,即在半導體薄片的兩端通以控制電流,在薄片的垂直方向上施加磁場強度為B的磁場,則在薄片的另兩端便會產生一個大小與控制電流、磁感應強度B的乘積成正比的電勢,這就是霍爾電勢。
用霍爾元件作為汽車的車輪轉速感測器時,多採用磁感應強度B作輸人信號,通過磁感應強度B隨輪速變化,產生霍爾電勢脈衝,經霍爾集成電路內部的放大、整形、功放后,向外輸出脈衝序列,其空佔比隨轉盤的角速度變化。齒盤的轉動交替改變磁阻,引起磁感應強度變化,即可測取感測器輸出的霍爾電勢脈衝。
如下圖所示,永磁體的磁力線穿過霍爾元件通向齒輪,齒輪相當於一個集磁器。
①當齒輪位於圖a)所示位置時,穿過霍爾元件的磁力線分散,磁場相對較弱。
②當齒輪徠位於圖b)所示位置時,穿過霍爾元件的磁力線集中,磁場相對較強。
③齒輪轉動時,使得穿過霍爾元件的磁力線密度發生變化,因而引起霍爾電壓的變化,霍爾元件將輸出一個mV級的准正弦波電壓,此信號再經過電子電路轉換成標準的脈衝電壓。脈衝的頻率,即每秒鐘產生的脈衝個數,反映了車輪旋轉的快慢,通過脈衝的頻率即可得知車輪轉速。

基本信息
- 中文名
- 輪速感測器
- 作用
- 測量汽車車輪轉速