反電動勢
反電動勢
直流電動機最初起動時,勵磁繞組建立一個磁場,電樞電流產生另一個磁場,兩磁場相互作用,起動電動機運行。電樞繞組在磁場中旋轉,因此產生髮電機效應。實際上旋轉電樞產生一個感應電動勢,與電樞電壓極性相反,這種自感應電動勢稱為反電動勢。emf通常表示電動勢,但由於它不是物理意義上的“力”,所以起不到任何幫助,但反電動勢仍然在電動機里作為自感應電動勢應用。反電動勢也稱為反抗電動勢,當電動機勻速運行時可以顯著地減小電樞電流。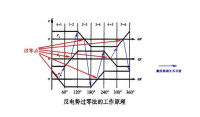
反電動勢
反抗電流通過或反抗電流變化的電動勢叫反電動勢。
在電能轉化方程UIt=εIt+Irt中,UIt即為輸入電池、電動機或變壓器中的電能,Irt即為各電路中的熱損失能量,輸入電能與熱損失電能的差值即為和反電動勢相對應的那部分有用能量εIt。
反電動勢消耗了電路中的電能,但它並不是一種“損耗”,與反電動勢相應的那部分電能,將轉化為用電器的有用能量,例如,電動機的機械能、蓄電池的化學能等。可見,反電動勢的大小,意味著用電器把輸入的總能量向有用能量轉化的本領的強弱——用電器轉化本領的高低。
1. 轉子角速度
2. 轉子磁體產生的磁場
3. 定子繞組的匝數
4.氣隙
當電機設計完畢,轉子磁場與定子繞組的匝數都是確定的,因此唯一決定反電動勢的因數是轉子角速度,或者說是轉子轉速,隨著轉子速度的增加,反電動勢也隨之增加。氣隙(定子內徑和磁鋼外徑之差)會影響繞組的磁通大小,從而也會影響反電動勢。
(1)如果電動機工作中由於機械阻力過大而停止轉動,這時沒有了反電動勢,電阻很小的線圈直接接在電源兩端,電流會很大,很容易燒毀電動機。
(2)當電動機所接電源電壓比正常電壓低很多時,此時 電動機線圈也不轉動,無反電動勢產生,電動機也很容易燒壞。
反電動勢也是有很多用處的,比如在CRT電視機中的行場回掃線消隱電路,便是用的行場逆程脈衝,也就是行場偏轉線圈的反電動勢。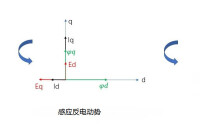
反電動勢
永磁無刷直流電動機的繞組反電動勢含有轉子位置信息,因此常被用於無感測器控制。應用於無感測器控制的反電動勢包括電機的相反電動勢和三次諧波電動勢。而相反電動勢的應用方法包括:反電動勢過零法、反電動勢積分及參考電壓比較法、反電動勢積分及鎖相環法、續流二極體法等。下面介紹反電動勢過零法。
反電動勢過零法
三相六狀態120°通電方式運行的無刷電機在任意時刻總是兩相通電工作,另一相繞組是浮地不導通的。這時候非導通繞組的端電壓(從繞組端部到直流地之間)或相電(從繞組端部到三相繞組中心點之間)就反映出該相繞組的感應電動勢。在實際應用場合,由於電機繞組中心點往往是不引出的,所以,通常將非通電繞組的端電壓用於無感測器控制時,稱為端電壓法。無刷電機氣隙磁場包含永磁轉子和電樞反應產生的磁場,只是永磁轉子產生的磁場和它感應的反電動勢才是我們需要的,而電樞反應會引起氣隙磁場的畸變和過零點的移動。嚴格來說,反電動勢檢測法適用於電樞反應電動勢比較小的電機,例如表貼式轉子的情況。在有些無刷直流電機中電樞反應比較強,使得非導通相的感應電動勢包含較大的電樞反應電動勢成分,這樣從端電壓中提取反電動勢過零點就存在較大的誤差。這種端電壓法容易實現,但往往帶有很多雜訊干擾信號,需用低通濾波器濾除。續流二極體導通引起的電壓脈衝可能覆蓋反電動勢信號。尤其是在高速重載或者繞組電氣時間常數很大情況下,續流二極體導通角度很大,可能使得反電動勢無法檢測。另外就是存在PWM干擾信號。
在對霍爾感測器正確位置分析時指出,如果以相反電動勢過零點定義為0°,為了獲得儘可能大的電機轉矩輸出,同一相的反電動勢和電流應當同相位。所以,正確換相點應當在延後30°處。也就是說,在相反電動勢過零點后30°時刻,應當就是該相換相點出現時刻。由於每隔60°應當出現一個換相點,檢測到反電動勢的過零點以後,延時(30+60K)°電角度(K=0,1,2…)就是相應的換相時刻。為了電路設計方便,取K=1,也就是取相反電動勢過零點滯后90°電角作為一個換相點。在每一相檢測電路將相電壓深度濾波,它不僅起到濾波作用,而且將輸入的反電動勢信號滯后一個90°電角度,從而得到電機換相的時刻。
一個反電動勢檢測電路的例子如圖所示。現以U相為例說明該檢測電路的工作原理:首先,U相端電壓經R和R進行降壓,然後經一階低通濾波器深度濾波,使其產生 近90°的滯后相移。再經過C隔直處理,以消除三相電壓不對稱所引起的過零點漂移。后再經過一次濾波處理,主要是消除高頻信號的干擾,基本不產生相位滯后。其輸出一路接到比較器U12B的同相輸入端,另一路經R與其他兩相耦合,產生電機的中性點電位作為參考電位,接到三個比較器的反相輸入端。比較器的翻轉點滯后反電動勢過零點約90°電角度,即比較器的翻轉點對應著電機的換相時刻。電路由R、R、C構成一階低通濾波器,該濾波器滯后相角極限值為90°電角度,因此C選擇較大電容值。滯后角度和滯后時間隨著電機轉速增加而增大,所以電機轉速較高時,滯后相角接近90°。例如,電路參數採用R=180kΩ,R=50kQ,C=2.2μF時,當轉速達到500r/min,相移為85.77°,滯后的相角接近90°。低轉速時滯后的相角偏離90°較大,為了不影響電機的出力並獲得好的特性需要對相位進行校正。可行方法是在控制器中實時對此滯后時間進行計算,對換相時間進行校正。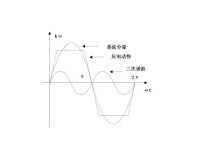
反電動勢
下面以常見的直流電磁繼電器為例加以說明。
電磁繼電器的驅動機構為電磁鐵,由鐵芯及纏繞在鐵芯上的線圈組成,其電氣特性與電感完全一樣,能夠抑制線圈中電流的變化。
通電時,電能轉化為磁能,電磁鐵產生恆定的磁場,繼電器動作。
斷電時,電能不再供應,電磁鐵線圈失電,電流迅速下降,磁場失去能量來源,磁場逐漸消失,此時磁場由恆定狀態變為變化狀態。
這也可以用能量守恆定律來解釋。通電時,電能轉化為磁能,斷電時,貯存的磁能轉化為電能。
問題是,既然能量守恆,那麼這些能量最終到哪裡去了呢?這就是能量釋放問題,也正是這個問題,造成了反電動勢的危害。
繼電器一般用開關或晶體管來控制。對於開關來說,在斷電瞬間,反電動勢會在開關的觸點之間產生電火花,造成觸點燒蝕。對於晶體管來說,反電動勢會導致其擊穿損壞。
克服反電動勢最簡單有效的方法,是在線圈兩端反向並聯一支二極體(二極體與線圈並聯),當產生反電動勢時,電流通過二極體釋放,從而保護控制元件。
採用上述方法以後,磁能轉化為電能,電能又全部轉化為熱能散發掉了。

基本信息
- 中文名
- 反電動勢
- 外文名
- opposing electromotive force
- 別名
- 反抗電動勢
- 作用
- 反抗電流發生改變
- 因素
- 轉子角速度、氣隙等
- 本質
- 由於電磁感應產生感應電動勢