交通控制系統
交通控制系統
交通控制系統是採用與時刻變化著的交通情況相適應的設備,組成按交通規則正確指揮交通的系統。交通控制系統今後將從被動系統向主動系統發展。在控制方法上,將改變定周期的系統控制,使系統內的周期可隨時改變,增加系統的靈活性,以適應瞬時變化的交通流量。在控制設備上,將廣泛採用大規模集成的電子化設備和微型計算機。
交通控制系統
採用與時刻變化著的交通情況相適應的設備,組成按交通規則正確指揮交通的系統。
最早控制交通的設備是1868年在英國倫敦安裝的色燈信號機。它是用煤氣燈照亮,后因煤氣爆炸而毀壞。1914年在美國克利夫蘭開始使用電光源定時信號機。1918年在紐約開始使用手動紅、黃、綠三色信號機。用信號機控制單個交叉口的交通信號稱為點控制。隨著交通量的增加,逐漸地從對單個交叉口交通信號的控制發展到對同一條道路若干個相鄰交叉口交通信號的控制,即線控制。世界上第一個實現交通線控制的系統於1917年出現在美國鹽湖城。這是一種內聯式線控制系統,它把一條道路上6個連續的交叉口的信號燈用電纜聯接,使用手動開關。此後十年間,先後又試驗成功了同時式、交變式、推進式線控制系統,它們都是機械聯動。到50年代,一些國家的汽車保有量進一步增加,線控制系統已不能滿足城市道路交通的需要。1952年美國在丹佛市試驗用電子計算機對道路網各交叉口的交通信號進行控制,這就是面控制。與此同時,在高速公路上也安裝了交通控制系統。1959年加拿大多倫多市進行實驗並於1963年正式安裝了世界上第一個實現面控制的面控制系統。此後,許多國家也都採用新型電子計算機,使一個區域內的信號燈協調運轉。中國於1932年在廣州開始採用手動信號燈,1976年在北京安裝了第一台單點感應式信號機,1978年在北京試用線控制系統。
普通道路交通控制分點控制、線控制和面控制。它們分別使用不同的控制系統。
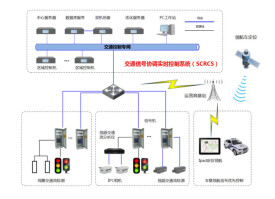
點控制系統 點控制是線控制和面控制的基本單元,它通過安裝在單個平交路口上的信號機控制信號周期和綠信比。信號周期是信號燈的紅、黃、綠燈各顯示一次的時間。綠信比是信號燈某方向的綠、黃燈顯示時間之和與信號周期之比。點控制的分類如下:定周期控制是使信號燈按預先定好的周期和綠信比運轉。這是最簡單、應用最普遍的一種控制方式。一段定周期控制是在全控制過程中信號燈只有一種周期和綠信比;多段定周期控制是信號燈預先定有若干個周期和綠信比,在控制過程中,根據交通量的變化,自動變換周期和綠信比。感應式控制是用感應式信號機根據安置在交叉口各入口的車輛檢測器所收集的交通情報,靈活地控制綠燈開放時間。全感應式控制是在交叉口各入口處都設有車輛檢測器;半感應式控制只在交叉口的某兩個入口設有車輛檢測器,使該方向的綠燈能靈活開放。線控制系統線控制有三個基本參數,即信號周期、綠信比和相位差。相位差是相鄰兩個交叉口信號機同方向綠燈開啟時間差與周期之比。實現線控制的系統有兩種:①有電纜線控制系統。系統設有主控制器。預先編好的各種控制模型貯存在主控制器內,主控制器通過傳輸電纜把控制指令發給各交叉口上的信號機,使其按控制模型的要求變換燈色;同時收集車輛檢測器所提供的交通情報,並進行處理。②無電纜線控制系統。這種系統不設主控制器,各種控制模型分別貯存在各交叉口的信號機內。這些信號機都裝有高精度的石英晶體鍾,用統一的時間而相互協調一致,按預定的控制模型運行。線控制系統根據功能又可分為三種:①單時段線控制系統。整個系統只有一種周期、綠信比和相位差,只能組合成一種控制模型。系統只按一種控制模型工作,不能適應經常變化的交通流量。這是早期發展的一種簡單線控制系統。②多時段線控制系統。它具有多種周期、綠信比和相位差,可組成多種控制模型,並能按時間自動變換,以適應交通流量的變化。③感應式線控制系統。具有有電纜控制系統所具有的控制功能。主控制器內貯存多種控制模型,根據車輛檢測器所檢測到的交通量大小,實時地改變控制模型。普遍應用的線控制模型有同時式、交變式、推進式等幾種。其基本原理是在各交叉口信號周期統一的前提下,適當調整各信號機的綠信比和相互間的相位差,使被控制的幹道上形成“綠波帶”,車輛在行駛中減少遇到紅燈的次數,從而提高幹道的通行能力。面控制系統 面控制是對城市道路網上若干個相鄰交叉口的信號周期、綠信比、相位差和設在道路上的各種可變標誌進行集中統一控制。面控制系統由以下幾部分構成:①控制中心,在控制中心設有中心處理機及其外圍設備、地圖顯示板、交叉口信號狀態顯示板、交通情況顯示板、交通事故和車輛誘導顯示裝置、控制台等;②傳輸系統,由中央數傳機、終端數傳機和傳輸線組成;③信號控制系統;④交通情報收集系統,由設在道路上的各種車輛檢測器組成;⑤可變標誌系統;⑥通信系統,包括有線電通信和無線電通信;⑦電視監視系統;⑧控制模型和軟體系統。面控制系統的功能:①收集交通情報。設在道路上的車輛檢測器隨時把檢測到的車輛數、車輛行駛速度、車輛阻塞度和空間佔有率等情報,通過傳輸系統送到中心處理機處理。②控制終端信號機和可變標誌。中心處理機根據交通流量的變化,實時地改變控制模型,隨時發出控制指令,控制終端信號機和可變標誌。③誘導車輛。中心處理機根據收集的交通情報,對於交通阻塞地點,一方面控制有關的終端信號機和可變標誌以誘導車輛,另一方面通過通信系統,發布交通阻塞情報,誘導車輛避開阻塞地點。④集中監視。通過各種顯示設備和電視監視系統,工作人員可了解控制區域內的交通狀況,為迅速排除交通阻塞、處理異常情況、採取人工干預提供直觀依據。面控制系統因有上述功能,所以對疏導交通流量,提高道路通行能力,減少交通事故和交通公害有明顯的效果。
面控制模型是保證實現系統功能的軟體系統。在一個區域內,把各種複雜的交通流視為一個整體,用交通流理論,確立其數學模型。
目前各國的面控制,多採用( )程序和( )程序實現對信號的控制。這種程序的基本原則是通過優化相位差,實現配時方案,以求全區域的最佳運行效率。高速公路交通控制系統
對高速公路上匝道(進出口)、交匯和行駛速度進行控制的系統。在高速公路匝道上設有信號燈或可變標誌。當高速公路上車輛阻塞或車流達到飽和容量時,便控制入口處的信號燈或可變標誌,限制車輛駛入。在發生交通事故或遇有施工等緊急情況時,也限制車輛駛入或駛出,或完全關閉匝道。對於剛駛入高速公路匝道的車輛,靠匝道上的信號機引導進入幹線,以保證交匯時的安全。設在高速公路上的各種可變標誌,隨時給駕駛人員提供道路上的車輛阻塞度、速度限制、路面濕度和冰凍狀況、交通事故和施工等情報,保證車輛按規定速度行駛。
交通控制系統
高速公路交通控制系統由各種檢測器、信號機、可變標誌、通信傳輸系統、設在控制中心的中心處理機及其外圍設備、交通狀況顯示板和使上述設備協調工作的軟體系統組成。控制人員為了直觀了解道路上的交通狀況和控制效果,還設有電視監視系統。展望
交通控制系統今後將從被動系統向主動系統發展。所謂主動系統即是按程序行駛系統。主動系統的中心處理機可直接掌握控制區域內每輛車的出發點和要去的目的地,並為其選擇最佳路徑。參考書目 U. S. Department of Transportation,Traffic Control Systems Handbook, Washington DC, Federal Highway Administration,1976. 豬瀨博,浜田喬:《道路交通管制》,産業偑書,東京,昭和47年。配圖 相關連接
基本信息
- 定義
- 按交通規則正確指揮交通的系統