姿態感測器
姿態感測器
徠姿態感測器是基於MEMS技術的高性能三維運動姿態測量系統。它包含三軸陀螺儀、三軸加速度計,三軸電子羅盤等運動感測器,通過內嵌的低功耗ARM處理器得到經 過溫度補償的三維姿態與方位等數據。利用基於四元數的三維演演算法和特殊數據融合技術,實時輸出以四元數、歐拉角表示的零漂移三維姿態方位數據。LPMS系列和iAHRS-M0 姿態感測器可廣泛嵌入到航模無人機,機器人,機械雲台,車輛船舶,地面及水下設備,虛擬現實,人體運動分析等需要自主測量三維姿態與方位的產品設備中。
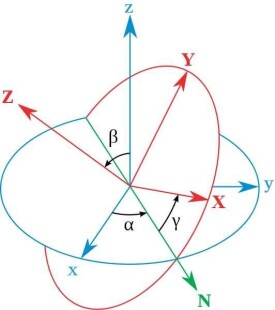
對於在三維空間里的一個參考系,任何坐標系的取向,都可以用三個歐拉角來表現。參考系又稱為實驗室參考系,是靜止不動的。而坐標系則固定於剛體,隨著剛體的旋轉而旋轉。
姿態感測器(E.T-ahrs)是基於MEMS技術的高性能三維運動姿態測量系統。它包含三軸陀螺儀、三軸加速度計(即IMU),三軸電子羅盤等輔助運動感測器,通過內嵌的低功耗ARM處理器輸出校準過的角速度,加速度,磁數據等,通過基於四元數的感測器數據演演算法進行運動姿態測量,實時輸出以四元數、歐拉角等表示的零漂移三維姿態數據。
姿態感測器(E.T-ahrs)可廣泛應用於航模無人機,機器人,天線雲台,聚光太陽能,地面及水下設備,虛擬現實,人體運動分析等需要低成本、高動態三維姿態測量的產品設備中。
n 靈活的數據輸出介面: I2C,SPI,串口
n 高速數據輸出率,最高500Hz
n 真正的低功耗,實測17mA
n 快速的啟動穩定時間,0.1秒
n 全形度無盲區三維姿態方位數據輸出
n 多種數據輸出選擇(歐拉角,四元數,旋轉矩陣等)
n 高動態響應與長時間穩定性相結合
n 複合型Kalman濾波與數據融合,捷聯式慣導技術
n 輸出絕對方向(地球磁場方向)
n 可在動態環境下啟動
n 跌落檢測輸出,超動態檢測輸出
n 三軸加速度、三軸角速度和三軸磁場強度計高度集成9DOF
n 徠軟體開發編程介面,Demo程序
基本信息
- 中文名
- 姿態感測器
- 外文名
- Attitude sensor
- 拼音
- zi'tai'chuan'gan'qi
- 特點
- 真正的低功耗,實測17mA
- 推薦產品
- LPMS系列