失鎖
失鎖
失鎖涵義表示環路既不鎖定,也不跟蹤,環路所處的工作狀態。失鎖通過環路調節作用可能有兩種不同結果:其一:可能使環路無法再鎖定;其二:可能使環路再鎖定。這是通常失鎖狀態總是指這種情況失鎖是鎖相環的固有屬性,引起失鎖的原因歸納起來有以下幾點:1、過大的頻率階躍;2、過大的頻率斜升;3、過大的雜訊干擾。

失鎖
鎖相環(phase-locked loop)為無線電發射中使頻率較為穩定的一種方法,主要有VCO(壓控振蕩器)和PLL IC,壓控振蕩器給出一個信號,一部分作為輸出,另一部分通過分頻與PLL IC所產生的本振信號比較,為了保持頻率不變,就要求相位差不發生改變,如果有相位差的變化,則PLL IC的電壓輸出端電壓發生變化,去控制VCO,直到相位差恢復,達到頻鎖的目的,使受控振蕩器的頻率和相位均與輸入信號保持確定關係的閉環電子電路。
同步是直接序列擴頻通信系統接收端的關鍵技術,也是影響其性能的重要指標。擴頻同步是一個相關的過程,是利用偽隨機序列的相關性能來實現的。偽隨機序列具有尖銳的自相關函數和接近於0的互相關函數值。同步一般包括兩個過程:粗同步和細同步。粗同步即捕獲,是讓本地PN碼與接收到PN碼相位的定時誤差在半個碼元周期以內。細同步即跟蹤,它要完成兩個功能:首先,繼續保持同步,進一步減小PN碼的相位差,一般可以保持在1/4或1/8個碼元周期內;同時,它要完成跟蹤的過程,當由於外界因素(通道時延和外部干擾等)使接收到的PN碼相位發生偏移,同步系統能夠加以調整,通過改變本地PN碼相位,使收發信機仍然同步,達到跟蹤PN碼相位改變的目的。
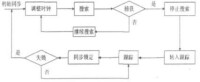
圖1 同步流程
擴頻碼跟蹤是系統同步的重要環節,擴頻接收機一旦捕獲到有用信號,本地參考PN碼必須準確跟蹤接收到的信號,減少接收機與發射機之間擴頻碼相位不能完全對準而造成的系統處理增益的損失,使系統最大限度地發揮其應有的抗干擾能力。擴頻碼同步通常採用延遲鎖定環的跟蹤方法。
(1)延遲鎖定環
延遲鎖定環(DLL)在跟蹤兩個相關波形的延遲差時是最佳電路。DLL是一個非線性反饋系統,其反饋環內採用了互相關的方式。延遲鎖定環的基本思想是產生一個在一定範圍內(比如一個碼片時間)對於定時誤差是單調變化的誤差函數,而且很容易使定時誤差為0時這個誤差函數的值也為0。這樣,時鐘相位就可以利用這個誤差函數進行負反饋調節,使其與發送時鐘的誤差得到控制。
(2)非相干延遲鎖定環原理
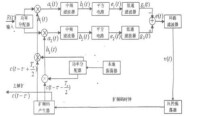
圖2 非相干延遲鎖定環原理

圖3 同步失鎖FPGA實現結果
為了降低同步失鎖誤判概率,本文採用門限檢測和峰值檢測相結合的方法,並進行多次檢測,以進一步降低虛警概率。失鎖判斷門限值設置方法為:首先進行Matlab模擬,得出理論門限值,一般取理論值的1/4~1/2,在本設計中取1/3理論值。峰值檢測是實際電路中檢測的峰值,可以和理論門限值結合起來一起使用。為了進一步降低虛警概率,本設計對門限值和峰值分別進行3次檢測,即當連續3次檢測到同步失鎖時,才跳出進入重新捕獲環節,開始新一輪的同步。圖3所示是同步失鎖的FPGA實現結果。可以看到,設計基本達到要求。由圖3上半部分可知,採用63位PN碼、接收端8倍數據速率採樣,延遲鎖定環每經過一個碼元周期(504個時鐘)對PN碼的時鐘調整一次,發現超出鎖定門限設置時,輸出一個脈衝標誌Pulse。由圖3下半部分可知,當Pulse連續輸出三個脈衝標誌時,即判斷為同步丟失,輸出重新捕獲的標誌ReSy,進入新一輪的同步環節。
GPS接收機在城區應用時,主要關心的一個問題就是頻繁的某顆星或多顆星信號中斷。城市中大樓和高架的短時遮擋很頻繁,同時存在外部干擾源的干擾,這將導致被遮擋的衛星不停地在捕獲和跟蹤狀態之間切換,嚴重影響定位的連續性。本文提出的失鎖后處理可以有效解決這個問題。
衛星信號失鎖之後可以選擇重新捕獲和快速恢復兩種方案。重新捕獲指的是因為失鎖時間過長導致的碼相位以及多普勒頻率完全無法預知,只有重新啟動捕獲模塊,對這顆衛星信號進行全碼相位或大範圍碼相位搜索以及大範圍的多普勒頻率搜索。如果僅失鎖了一段時間,但仍然可以通過一些途徑獲知當前時刻的碼相位範圍值以及較小的多普勒頻率範圍,那麼不需要佔用捕獲通道,可以直接用跟蹤通道里的積分電路通過在獲知的多普勒頻點上做下變頻,在獲知的碼相位範圍內通過扣本地碼鍾來解擴,當積分值大於門限時認為捕獲成功,然後直接切換到跟蹤狀態,進而快速參與定位,這稱作快速恢復。重新捕獲需要較長的時間,尤其當接收機捕獲通道較少時,每顆失鎖的衛星都需要排隊等待捕獲通道,這需要一定的等待時間,衛星信號捕獲也需要一定的時間。快速恢復能節省這些時間,保證接收機因干擾或信號遮擋等原因造成的短時間定位中斷具有快速恢復定位能力。快速恢復需要從失鎖前的多種狀態和到當前時刻的時間計數,推算出當前時刻的多普勒頻率、碼相位和導航比特邊界。本文研究了包括多普勒頻率預測、碼相位預測、導航比特邊界預測的推算條件、推算方法和推算誤差,研究了失鎖后處理演演算法,並通過對多種失鎖情形的模擬驗證了此失鎖后處理演演算法具有一定的工程應用價值。
(1)載波多普勒頻率預測
從星曆或曆書可以得到當前時刻的衛星位置以及速度矢量,再根據估算出的當前時刻接收機位置和接收機速度,代入式可以計算得到多普勒頻率。當前時刻的接收機位置和接收機速度是未知項,這裡用失鎖時刻的接收機位置和接收機速度進行推算得到,推算的假設條件是這段失鎖時間內接收機仍然保持失鎖前的運動速度。
多普勒頻率預測的主要誤差來自估算出的當前時刻接收機的位置和接收機速度,在這段失鎖時間內,若接收機的運動狀態發生改變,則會導致當前時刻的接收機位置和速度不準,進而影響最終推算出的多普勒頻率。所以,最大預測誤差需要考慮接收機的載體最大運動狀態改變數導致的接收機最大位置預測誤差和最大速度預測誤差,可通過建模模擬得到多普勒頻率預測最大誤差f,進而得到多普勒頻率範圍。
(2)碼相位預測
根據失鎖時刻的正確碼相位以及載波多普勒頻率,再加上失鎖前到當前時刻的接收機時間計數,可以推算出當前時刻的碼相位。這裡的推算有個假設,即失鎖時間段內的碼多普勒頻率沒有變化。
這裡的預測誤差主要源於失鎖時間段內碼多普勒頻率不變的假設。一般動態的GPS接收機短時間內碼多普勒頻率的變化量很小,所以碼相位預測誤差很小。當接收機應用在高動態場合時,碼相位預測誤差需要做進一步分析和計算,由碼多普勒頻率的最大變化量,通過式可以反解出碼相位預測誤差值超過幾個碼片的時間n,這個時間值可以作為失鎖后處理流程中狀態切換選擇的時間門限值,時間計數超過該時間門限值選擇重新捕獲,小於該門限值選擇快速恢復。
衛星信號因短暫遮擋造成信號失鎖以後,通過上節的預測演演算法實時計算得到當前時刻的多普勒頻率、碼相位和比特邊界,一旦無遮擋以後,通過扣本地碼鍾捕獲快速進入跟蹤狀態,這樣就能迅速地參與定位。在實際的複雜應用場合下,每顆星的遮擋時間不一樣,且面臨某顆衛星信號不是因遮擋而是長時間丟失的可能,所以後處理演演算法的綜合考慮尤其重要。
對於因短時間遮擋信號中斷、短暫信號強度衰減或短暫干擾而造成的某顆或多顆衛星失鎖,設計方案一定要有抗長時間遮擋的能力,以及快速地恢復到能參與定位的能力。所以有如下設計:①通過有效消除接收機鍾漂來提高多普勒頻率和碼相位預測準確度;②增加扣鍾捕獲的扣鍾範圍,提高對碼多普勒頻率預測誤差的容忍能力;③使用鎖頻環,提高對載波多普勒頻率預測誤差的容忍能力;④使用寬頻寬初始跟蹤和載波環輔助碼環,加快碼環穩定。對於因某顆星已不在接收機視距範圍內而造成的信號失鎖,接收機要儘快釋放通道資源,為其它可見衛星信號讓道。所以,在選擇重新捕獲和快速恢復前,需要對失鎖的衛星做仰角判斷,如果仰角不夠好,就直接釋放這顆衛星的通道資源。
若失鎖后的衛星或接收機運動狀態發生很大改變,將造成載波多普勒頻率預測出現大誤差,致使扣本地鐘的捕獲方式不成功。這時候需要設置時間門限T,當時間超過門限時申請捕獲通道資源重新捕獲,如果失鎖的衛星重新捕獲一直不成功,而捕獲時間超過門限T,則釋放捕獲通道,重新排隊申請下一輪的捕獲通道,若第三輪仍捕獲不成功,則釋放這顆衛星的捕獲和跟蹤通道。
我們使用SPIRENT的GPS模擬源,設置衛星信號失鎖的時間,模擬各種運動模型,驗證了失鎖后處理設計的GPS接收機有以下性能:
①低動態和短時失鎖。設置所有衛星信號都中斷20 s,運動模型設置為車載和靜止。因為預測求出的多普勒頻率以及碼相位誤差不大,信號中斷恢復后,多顆星幾乎同時重新扣本地碼鍾捕獲成功和跟蹤鎖定,GPS接收機重新定位的時間在1 s以內。
②高動態和長時間的失鎖。設置所有衛星信號中斷1min,運動模型設置為飛機模型。因為預測求出的多普勒頻率以及碼相位誤差較大,部分衛星扣本地碼鍾捕獲不成功,而後通過啟動重捕達到鎖定並參與定位。這就保證了接收機的穩健性。
③弱信號時,設置接收機載噪比為25 dB-Hz,所有衛星信號都中斷20 s。同步邊界的預測對接收機的快速恢復定位非常重要,因為信號重新鎖定后,就可以直接進行比特數據解調和快速恢復參與定位,GPS接收機重新定位的時間在1 s以內。若沒有加同步邊界預測,此時重新找比特邊界需要用秒級的非相干時間,這就影響了電文解調和定位恢復速度。綜上所述,此失鎖后處理設計能增強GPS接收機的穩健性,加快接收機失鎖后的定位恢復速度,具有一定的工程應用價值。

基本信息
- 中文名
- 失鎖
- 外文名
- Loss of lock
- 運用領域
- 閉環電子電路
- 描述
- 環路不鎖定,也不跟蹤的工作狀態
- 學科
- 無線電