AGM-84反艦導彈(代號:A/R/UGM-84,綽號:Harpoon,譯文:魚叉/捕鯨叉),是由美國麥克唐納-道格拉斯公司研製的反艦導彈,在1979年裝備部隊使用,也是美國海空軍現役最主要的反艦武器,可以自飛機,各類水面軍艦以及潛艇上發射。此外,美國海軍還利用魚叉導彈開發出遠程對地打擊型(SLAM:Stand-off Land Attack Missile)。
在美國三軍通用編號當中,AGM-84為空射型,RGM-84為艦射型,UGM-84則是水下潛艇發射型,一般統稱為AGM-84,它們的基本結構都是相同的。
蘇聯P-5反艦導彈,北約代號SS-N-3柚子
由於主要的對地、對海打擊任務由航空母艦戰鬥群擔任,美國海軍在1950、60年代追隨蘇聯的腳步 發展反艦導彈,只有在1965年,美國海軍航空系統司令部(NAVAIR)啟動一項空射戰術反艦導彈的研究案,主要目的是攻擊當時配備
SS-N-3反艦導彈的蘇聯潛艇;由於SS-N-3導彈只能在水上發射,因此美國海軍計劃趁其在水面上進行發射作業時,搶先發射導彈將之擊沉;由於這種攻擊型態類似捕鯨船以魚叉攻擊浮在水上的鯨魚,因此計劃代號就稱為魚叉(Harpoon)。在當時,“魚叉”的射程要求是25海里(40km)。

蘇聯P-15反艦導彈,北約代號SS-N-2冥河
同樣在1965年,麥克唐納·道格拉斯公司(McDonnel Douglas)也自費進行一項長程反艦導彈研究:在這項研發之中,
麥道考慮了
渦扇發動機與
渦噴發動機兩種選擇,麥道認為渦輪扇發動機比較省油,但是渦輪噴射發動機成本更低,並且能在相同體積下提供更高推力。因此,麥道選擇使用渦輪噴射發動機作為這 種反艦導彈的動力,而渦輪扇發動機則比較適合體積更大、射程更遠的戰略型巡航導彈。
爾後,受到1967年
六日戰爭中,以色列驅逐艦愛拉特號(INS Eilat)遭到埃及
導彈快艇以俄制SS-N-2反艦導彈擊沉的刺激,美國海軍才開始重視反艦導彈的發展。於是,美國海軍立刻拿出手頭上現有的魚叉導彈研究案,將目標改成攻擊水面船艦,主要需求是能攜帶250磅(113.4kg)的戰鬥部飛行40海里(74km)以上,而且能兼容於現有的艦載導彈發射器的發射架與彈艙。由於射程需求大增,因此必須將最初魚叉計劃的火箭發動機改成吸氣式渦輪發動機。

BQM-34“火蜂“靶機
依照前述調整,美國海軍在19 68年展開
魚叉反艦導彈的初步研究。同時,美國海軍武器系統司令部(NAVORD)也提議,發展一種以現有機體改裝而來的過渡型導彈,填補魚叉導彈開發完成前的空檔。在1968年11月,NAVORD選定以美國海軍現有、由萊恩(Ryan)公司開發的火蜂(Firebee)靶機改裝為反艦導彈。其實,萊恩公司先前已經曾向美國海軍提出一種名為火花(Fireflash)的火蜂靶機反艦版本。在1971年4月,反艦版火蜂展開艦載測試,並在同年9月完成全系統的打靶試射;不過美國海軍還是放棄這個構想,全力發展魚叉反艦導彈。

AGM-84反艦導彈的CAE J402發動機
在1970年11月,美國國防系統獲得評審 委員會(DSARC)批准海軍發展魚叉導彈,當時總共有艦射型(RGM-84A)與空射型(AGM-84A)兩種,彈體結構與系統都相同,主要差別在於艦射型採用摺疊彈翼以容納於發射管,並在彈尾增加一截固態助推來讓導彈升空並達到啟動渦輪的速度。在1971年1月,美國海軍針對魚叉導彈展開招標(當時有5家廠商參與);其中,麥道由於以經自行進行數年的渦輪噴射反艦導彈研究,自然比其他競爭者更具優勢。在1971年6月,美國海軍果然選定麥道為彈體主承包商,隨即進入工程發展(EMD)階段。

F-16戰鬥機掛載AGM-84反艦導彈
整個工作分為設計、研發和使用測試三個階段,總共製造了102枚原型彈,其中32枚用於設計階段, 40枚用於研發階段,30枚用於使用測試;這102枚之中,80枚擁有導引及控制系統,而之中10枚則配備戰鬥部。在1972年,魚叉導彈的發動機承包商也塵埃落定,由Teledyne公司擊敗蓋瑞特(Garrett)成為魚叉導彈的渦輪噴射發動機承包商,發動機型號為J-402。在70年代初期,西方情報單位確認蘇聯海軍已經部署第一種能從水下發射的P-70反艦導彈(北約代號SS-N-7 Starbright),並搭配
查理級巡航導彈核潛艇,因此美國海軍也決定跟進發展類似系統,在1972年1月將潛射魚叉導彈(編號UGM-84A)納入需求,此種版本系以一種“膠囊(encapsulated)”外罩將魚叉導彈密封,由魚雷發射器射出后浮出水面,裡面的導彈才進行點火發射。此後,麥道又自行加入岸基發射版本,使魚叉反艦導彈成為西方第一種兼具空射、艦射、潛射與岸射四種版本的反艦導彈系統。

AGM-84反艦導彈發射瞬間GIF
魚叉導彈在1972年7月展開魚叉導彈的地面測試,1972年12月至1977年3月進行了飛行與實戰測試,總共發射了40枚。最早的基本型魚叉導彈可攜帶500磅(227kg)戰鬥部飛行60海里(111km)。在1972年10月20日,一架美國P-3C巡邏艦成功以空射魚叉導彈(編號AGM-84)擊中靶艦,成為魚叉導彈首次成功的實彈試射。在1974年6月,DSARC批准生產150枚預量產型魚叉導彈用來作戰測評之用。魚叉導彈從1975年7月開始量產,研發工作於同年12月全部完成,並在1977年7月進入美國海軍服役。第一批艦射型魚叉導彈(編號RGM-84A)在1978年6月運交美國海軍,首批空射型的AGM-84則在1979年服役,而首批UGM-84A潛射型魚叉導彈則於1981年起服役。到了1979年後期,第1000枚艦射型魚叉導彈已經交付美國海軍。美國向台灣交付了空射型、艦載型、潛射型魚叉反艦導彈。
魚叉導彈不僅供美國海軍使用,還大量供給盟國使用,現有將近30個國家使用,總數約6000枚,是西方世界最普遍的反艦導彈。

一枚AGM-84反艦導彈模型
魚叉導彈的導引方式、尺寸重量的等級與同時期名 滿天下的法制飛魚反艦導彈(Exocet MM-38~40)類似,但是採用渦輪發動機推進使得射程較後者大幅增加(飛魚導彈使用固態火箭作為動力)。魚叉導彈的彈體擁有兩組十字形翼面,位於彈體中部是四片大面積梯型翼,彈尾則設有四面較小的全動式控制面,兩組彈翼前後完全平行,而且均為摺疊式,摺疊幅度為彈翼的一半;此外,艦射、潛射型的火箭助推器上也有一組十字形穩定翼。為了減輕重量,除了戰鬥部、加力器採用鋼質結構外,魚叉導彈其餘的外殼、翼面都採用鋁合金製造,整枚導彈由前而後依序為導引段、戰鬥部、推進段與尾艙。

魚叉反艦導彈剖面圖②
魚叉導彈彈體長3.84m,含加力器則為 4.6M,直徑34.3CM,翼展91.4CM。導引段位於導彈前部,主要組件包括彈鼻天線罩、
德州儀器公司(TI)的PR-53/DSQ-28主動雷達制導尋標器、導彈導引單元(Missile Guidance Unit,MGU)、漢緯的AN/APN-194單脈衝雷達高度計及其發射天線。PR-53/DSQ-28採用J波段頻率,擁有捷變技術,全面採用故態電子元件固態,機械掃瞄式的圓型低旁波瓣陣列天線的旋轉範圍為正負各45度角,能在各種天候下搜索遠方的海上小型目標,並具備優秀的電子反對抗能力。

23型護衛艦發射魚叉反艦導彈
魚叉導彈發動機段佔據彈體後段,主要部件 包括鋁製的半埋固定式發動機進氣道(進氣流量4.35kg/s)、一具德利台開發的CAE J-402-CA-400型單軸渦輪噴射發動機以及燃料箱,此外還有1個發射電纜插孔以及2個位於燃料箱前端的2個銀鋅電池;而彈體靠近尾翼以及連接發射架的后彈耳處還刻意加強了結構。艦射及潛射型魚叉的彈尾擁有一具固體火箭加力器,長度0.74m,重137kg,裝有66kg的高能推進劑,推力為6732dN,作用時間約2.5~3秒,能在發射后2.9秒內讓導彈獲得10G的加速度,飛行速度達到0.75馬赫,當導彈爬升至340m的高度時便自動脫離,由渦輪發動機接手工作。

Teledyne CAE J402渦噴發動機
J402-CA-400單軸渦輪噴氣發動機長度0 .748m,重45.36kg,採用環形燃燒室,壓縮機為軸流和離心組合式,轉子轉速為41200r/min,
壓縮比5.81,耗油率34mg/Ns,持續推力294dN,在海平面高度上從起動到最大推力的額定時間約7s,持續作用時間為15分鐘,工作壽命約1小時,能提供彈體0.85至0.9馬赫的巡航速度。燃料箱長度為1.22m,可儲存45.4kg的燃油。發動機工作時,燃油先透過負載彈性波紋管加壓,接著進入燃燒室,混合加壓空氣然後點火燃燒。發動機的點火裝置採用固體推進劑起動器以及含鎂量為62%的煙火劑,由電發火星塞引爆起動,在低溫、低空速時亦能正常起動,在測試中於高溫(71℃)、低溫(-54℃)環境都能順利啟動。位於尾艙的尾翼採用電力伺服驅動,每個翼面的
舵機由連續運轉馬達、傳動機構、摩擦圓盤離合器及制動器組成,偏轉角度為正負各30度。
魚叉導彈的MGU包括飛行姿態控制系統和飛行高度測量系統,前者由利爾·西格勒公司的三軸捷聯式慣性姿 態參考儀(Attitute Regerence Assembly,ARA)、國際商業儀器公司的4PISP-OA數位計算機以及供電單元(又稱數位計算機/供電器,Digital Computer/Power Supply,DC/PS)/自動駕駛儀構成一個單一總成,重量僅11kg,耗電功率為100W。4PISP-OA擁有7680個16位元二進位編碼指令唯獨存儲器和512個word的隨機存取存儲器,ARA則擁有3個速率陀螺,負責向自動駕駛儀提供導彈在三個軸向的角速度,進而求得相對應的控制信號傳給尾翼控制系統。至於飛行高度測量系統則以AN/APN-194單脈衝主動式雷達高度計為主,用於維持低空巡航的飛行高度,其窄波主動雷達發射天線位於導彈戰鬥部外殼處下方。
魚叉導彈系統的射控端為AN/SWG-1(V)魚叉導彈艦 用射控組(Harpoon Shipboard Command and Luanch Control Set,美軍稱之為Sickles,簡稱為CLS),此系統設有一個戰術資料庫,在接戰時能依據不同戰場情況,自動從戰術資料庫中篩選適當戰術來輸入導彈。在導彈發射前,艦上的AN/SWG-1射控系統會先將導彈的DC/PS完成初始化,輸入相關戰術資料;導彈發射后,DC/PS會接收來自於ARA的加速資料,以及雷達高度計傳來的高度,控制彈翼將導彈保持在預先輸入的飛行模式中;當雷達尋標器開啟並鎖定目標后,DC/PS便根據雷達獲得的目標位置加以攻擊。

巴貝號護衛艦 (FF-1088)發射魚叉反艦導彈
魚叉導彈通常採用距離/方位(Range and Bearing L uanch,RBL)接戰模式,此時艦上射控雷達已經獲得目標方位與距離信息並輸入導彈的DC/PS內,再由載台與目標距離選擇適當的尋標器掃瞄模式。在中途航行階段,導彈依照慣性導航 系統產生的指令作為控制依據,當導彈接近目標時,才開啟主動雷達尋標器來確實鎖定目標,如此的好處是避免過早開啟雷達使讓敵方電子支援裝置有所警覺。魚叉導彈的初期彈道高度為700至800公尺,進入終端彈道時,才將飛行高度降至海平面數米,以躲避敵方雷達,此時並打開主動雷達搜尋目標。依據掃瞄範圍,魚叉導彈的雷達尋標器有大、中、小三種視窗模式擇一使用;使用範圍越小的視窗模式,就需要更精確的
慣性導航資料,而受敵方電子對抗的機會也越小。

金剛級驅逐艦霧島號上的魚叉導彈發射裝置
發射器方面,艦射型魚叉導彈最常使用的是 圓桶狀發射器,每組發射器以雙聯裝或四聯裝的面貌出現。這種發射器有兩種型號:一般的MK-141以及適合小型艦艇的輕量化MK-140。MK-141的發射管壁比MK-140厚,並具有防震功能。除了專屬的MK-140/141發射器外,魚叉導彈還能裝填於幾種美國海軍制式發射器內,如單臂的MK-13、雙臂的MK-26以及平常用於裝填ASROC反潛火箭的MK-112八聯裝發射器。MK-112的左、右兩側各兩個發射箱能選擇裝填魚叉導彈,因此每具MK-16最多能有四枚魚叉導彈在發射器內備便。

勞倫斯號驅逐艦上的MK11導彈發射裝置
相較於法國早期飛魚(MM-38)、義大利早期型奧圖瑪(Otomat)以及瑞典早期型RBS-15等反艦導彈,雷達尋標器搜索範圍較窄,大約只有偏離軸心的正負5到10度以內,因此發射前船艦需要轉向,將發射器對準目標 大致方位,否則導彈開啟雷達尋標器之後將難以鎖定目標;所以這些反艦導彈發射器多半需盡量朝向前方,使船艦以艦首接敵(最快速度接近敵方,並將暴露的雷達截面積減至最小)時,不需要大幅轉向就能儘快發射導彈,但對於安裝位置的要求較高。魚叉反艦導彈一開始就擁有大角度的尋標器,即便發射時導彈與目標之間的夾角較大,雷達尋標器還是能捕獲目標並控制導彈轉向,所以MK-141發射器對於射界的要求低,不必佔用艦上射界最好的前、后位置(這些位置通常需留給艦炮與防空導彈),通常以橫向安裝於艦體中部上層結構之間,最大幅度地節省甲板空間。
| 基本規格 |
| 總重 | 1,110千克 |
| 全長 | 4.63 |
| 直徑 | 0.34 m |
| 翼展 | 0.914 m |
| 戰鬥部重量 | 221公斤 |
| 基本性能 |
| 最大射程 | 93-315 km 依發射平台而定 |
| 最大速度 | 0.85馬赫 |
| 制導系統 | 主動雷達制導 |
| 發射平台 | 多平台: RGM-84A 艦射型、陸射型 AGM-84A 空射型 UGM-84A 潛射型 |

AGM-84A
第一批魚叉導彈(A/R/UGM-84A型)屬於Block 1A,使用JP-5渦輪用燃油,最大射程約111km,最小射程13km。在迫近目標時,魚叉Block 1A採用Pop-Up攻擊模式,先躍升至1800m的高度再以7度的角度俯衝而下,穿入敵艦艦體或在上空引爆,摧毀其上層結構與電子系統;這種攻擊模式是考慮到蘇聯遠洋艦艇噸位龐大,不可能光以彈頭僅200kg的魚叉導彈直接擊沉,還不如讓其失去戰力,航空母艦再派遣飛機加以擊沉。
RGM-84B
魚叉Block 1B(UGM-84B及 RGM-84C)則是為英國皇家海軍所開發,爾後亦被美國海軍採用。魚叉Block 1B改用燃燒效率較高的JP-10燃油,射程增至130km,並改良尋標器,終端彈道也改為貼海直飛,直接攻擊目標艦的水線部位。

A-4天鷹掛載ATM-84A
1985年服役的魚叉Block 1C(A/R/U GM-84D)是Block 1B的進一步改良型,改良重點在於導引系統,包括提升電子反反制能力、增加可靠度、改良引信 以及增加突防能力等,並能依據海況或目標性質選擇的終端攻擊模式(平飛或拉高俯衝)。突防方面,魚叉Block 1C的導引系統能 預先設定三個巡航轉折點,使敵方無法得知發射艦的原始方位,此外還能改變飛行高度,並變換主動雷達開啟的時間點與目標距離,以混淆敵艦的防空系統。為了閃避地形或避開其他目標,魚叉Block 1C可選擇在發射初期以較高的高度巡航,越過障礙物后再恢復貼海飛行。魚叉Block 1C可選擇不同的終端攻擊模式,包括Pop-Up以及直接攻擊水線,在發射前由操作人員輸入導彈。
此外,魚叉Block 1C的導彈射控系統升級為AN/SWG-1A(V),能配合Block 1C的諸多戰術特定如尋標器掃瞄模式、轉折點、修正搜索模式(Offset Search)、終端攻擊模式等,使導彈的突防效率提高。例如在經過計算后,設定幾枚導彈的轉折點,使這些導彈能在同一時間以不同的方位攻向敵艦,讓目標艦的防空系統顧此失彼。早期的魚叉Block 1A/B隨後均已提升至Block 1C的水平。

掛載在F/A-18上的AGM-84E
魚叉Block 1D(A/RGM-84F)進一步改良 導引系統並延長射程,導引系統改用速度更快、存儲器更大的中央處理單元,強化電子反反制能力,並採用若干AGM-84E距外陸攻導彈(SLAM)使用的技術。魚叉Block 1D增加了名為“苜蓿葉”的立體交叉搜索模式(Cloverleaf Search Pattern),如果其進入目標區后找不到目標或因受到誘餌干擾 等因素使第一擊失手,便會自動進入等待航線並展開立體交叉搜索,以尋找真正目標重複攻擊。魚叉Block 1D的彈身加長1480px以增加燃料裝載量,使得 最大射程增至278km,導彈總重則增加90kg。魚叉Block 1D增加射程的主要目的並不是延長攻擊距離,而是提供立體交叉搜索模式下所需的額外航程。

美國海軍朱厄特號(CG-26)
為了因應彈體增長對穩定性的影響,魚叉Bl ock 1D的彈翼略往前移。由於彈體延長,無法兼容於美國潛艇的533mm魚雷管,因此魚叉Block 1D並未推出潛射型,而且無法裝入MK-13單臂發射器或MK-16八聯裝發射器。魚叉Block 1D在1991年9月4日由貝克納普級導彈巡洋艦的朱特號(USS Juett CG-29)進行五次試射,全部命中目標;不過隨著前蘇聯解體,魚叉Block 1D的新彈量產計劃遂遭到取消,不過還是有生產改裝套件來替既有的魚叉Block 1C進行升級。此外,依據魚叉Block 1D發展而來的Block 1G,擁有新型尋標器並具備重複攻擊能力,在1996年通過測試,並於1997年投入外銷市場。

澳海軍試射首枚Block II反艦導彈
魚叉反艦導彈下一階段的重要發展是Block-2,型號為A/R/UGM-84L,基本上是以魚叉Block 1C為基礎大幅改良而成,彈長4.6m,彈重691kg,射程約152km,兼具反艦與陸攻兩種能力。魚叉Block 2換裝新型主動雷達/紅外線雙尋標器,大幅增加突防能力,其新型導引系統整合有全球定位/慣性導航系統(GPS/INS)、L波段數據鏈系統以及新的軟體與控制系統,其中GPS天線、接收器與數據鏈來自於波音SLAMER距外陸攻導彈,尋標器部分沿用自AGM-65D小牛空對地導彈,GPS/INS系統則沿用於聯合直接打擊彈藥(JDAM),大量使用現有組件能有效降低魚叉Block 2的研發與生產成本。

澳海軍試射首枚Block II反艦導彈
一般傳統的主動雷達制導反艦導彈由於無法克服沿岸地形雜波對尋標器的干擾,因此很難攻擊停泊在港內的艦艇。而魚叉Block 2反艦導彈則因為擁有高 精確度GPS/INS,能導引導彈擊中特定的瞄準點,與雷達尋標器是否受地形回波影響完全無關,因此能有效攻擊停泊在港內的艦艇或沿岸目標。而在執行傳統反艦任務時,導引系統也能利用射控資料庫中的海岸線地形影像圖(由衛星提供,定時更新)或目標外型影像圖,結合GPS/INS提供的導航定位信息以及紅外線尋標器獲得的偵搜影像進行比對過濾,加上操作人員可透過數據鏈介入導彈的操控,遂大幅增加了中途導引的精確度,使操控者能在島群、近岸地形甚至船團中辨識出特定目標加以攻擊。即使在離陸地非常近的海岸,魚叉Block 2都能維持極高的命中率。但是到13年為止,美國海軍本身並沒有購買。
魚叉Block 3則是針對美國海軍 原有的魚叉Block 1C進行改良,利用一些升級套件進行;然而,由於升級套件中的數據鏈開發延誤、國防預算刪減等因素,魚叉Block 3在2009年4月遭到取消。雖然如此,未來美國海軍還是可能繼續對魚叉Block 1C進行改良.。

F/A-18C右翼的AGM-84 SLAM
供美軍軍機使用的AGM-84E距 外陸攻導彈(Stand-Off Land Attack Missile,SLAM)從1990年開始服役,系以魚叉導彈為基礎發展而來,沿用魚叉導彈的彈體、推進系統與戰鬥部,改采AGM-65D小牛導彈的
紅外線尋標器並加裝GPS以及供發射機傳輸指令的L波段數據鏈,裝置在戰鬥機上以攻擊陸上目標,在波斯灣戰爭中有不錯的表現。
而SLAM在1990年代末期也出現了新的改良型──AGM-84H增程距外陸攻導彈(Standoff Lan d Attack Missile,SLAM-ER),於1998年開始交付,2000年達成初始操作能力(IOC)。SLAM-ER主要的改良包括採用更大的戰鬥部與推進段、一對新的大型海鷗式前彈翼、新型高解析度熱成像尋標器;隨後進一步改良的SLAM-ER ATA(型號為AGM-84K,2002年達成初始操作能力)增加一個具備自動目標鎖定(Automatic Target Acquisition; ATA)的新型任務模塊,可自動識別導彈紅外線尋標器獲得的影像,能分辨目標特定部位,進行精確的定點打擊,同時防止誤擊的發生。與戰術型戰斧相同,SLAM-ER不僅能攻擊發射前預設的目標,還可在飛行途中透過導彈數據鏈臨時更換攻擊的目標當。

SLAM ER

F-15E翼下的SLAM-ER
特別的是,SLAM-ER擁有“停止運動瞄準點修正” (SMAU) 的能力,飛行員透過數據鏈獲得導彈尋標器的目標影像,並將此影像“凍結”在顯示器上,利用游標選擇特定的命中點,然後控制導彈攻擊此一定點,直到導彈距離目標926m都還可以更改命中點。當SLAM-ER飛至距離目標5.56km處,便會自動對目標進行毀傷效果評估並回傳至發射機。當然,SLAM-ER也延續了魚叉Block 1D的反覆攻擊能力,一旦目標脫鎖,就會在附近空域兜圈子重新尋找目標。SLAM-ER彈長增至4.4m,戰鬥部增至400kg,翼展增至2.43m,有效射程則為278km以上。在2002年5月,美國海軍航空系統司令部(NAVAIR)在太平洋靶場進行了一次SLAM-ER的試射,導彈由一架F/A-18C負責攜帶。導彈F/A-18翼下的SLAM-ER的攻擊計劃並非如以往般在起飛前便預先設定好,而是由靶場控制室透過戰術傳輸單元(TDM)向飛行中的F/A-18C傳送目標位置信息,而F/A-18C在距離目標93km外發射導彈。一同參與試射的還有一架
S-3反潛機,機上掛載一具AWW-13資料傳輸莢艙,嚮導彈內的SMAU發送控制訊號,控制導彈朝向理想的瞄準點。
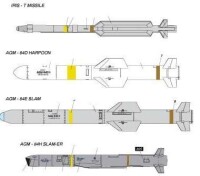
SLAM與IRIS-T和AGM-84對比
在2003年10月,美國海軍在南加州靶場試射了一枚擁有改良型軟體的SLAM-ER,來自美國海軍VX-9實驗中隊的F/A-18C在目標145km以外發射一枚SLAM-ER,隨後則由VF-31中隊的F/A-18F戰鬥機尾隨發射后的導彈進行導控,直到導彈命中目標。在導彈飛行途中,紅外線尋標器的目標影像透過先進武器數字傳輸莢艙傳送給三架參與實驗的
F/A-18以及美國海軍航空系統司令部的控制室,導彈的控制權則由VX-30中隊的F/A-18F機員所掌握。SLAM-ER在2002年9月通過美國海軍的測試評估,隨後美國海軍訂購了首批376枚SLAM-ER,訂購總數將在700枚之譜。

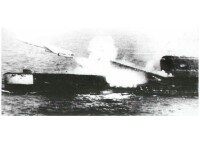
被魚叉導彈擊沉的伊朗護衛艦薩罕德號
魚叉導彈從80年代兩伊戰爭開始接受戰爭洗禮,獲得不錯的表現。魚叉導彈第一場實戰記 錄發生在1980年11月的兩伊戰場,伊朗以先前購自美國的RGM-84A魚叉反艦導彈擊沉伊拉克海軍1350噸級L-78號兩棲支援艦(俄制Polnocny-D級)。
1988年由於伊朗片面宣布對波斯灣的各國油輪展開無限制攻擊,美國海軍遂開入波斯灣介入兩伊戰爭,交戰時美國與伊朗均曾發射魚叉導彈攻擊對方。在1988年4月14日,美國海軍羅伯斯號(USS Roberts FFG-58)誤觸伊朗水雷而受重創,美國海軍遂在4月18日對伊朗發起名為螳螂行動(Operation Praying Mantis)的報復攻擊。在4月18日上午美軍陸續摧毀兩座伊朗鑽油平台後,伊朗海軍一艘戰士-II型導彈快艇 約珊號(Joshan P-25)接近一支炮擊伊朗鑽油平台的美國艦隊,併發射一枚RGM-84A魚叉導彈。

溫賴特號(USS Sainwright CG-28)
這支美國編隊的貝爾納普級巡洋艦溫賴特號(USS Sainwright CG-28)與一架來自於諾克斯級護衛艦巴格雷號( USS Bagley FF-1069)的SH-2F反潛直升機立刻朝這枚導彈投射干擾絲;最後這枚導彈由溫賴特號右舷通過落海,美軍推測此時這枚導彈的尋標器已經失效;由於美軍艦上的電子支援系統並未偵測到魚叉導彈尋標器的雷達訊號,因此這枚魚叉導彈可能是尋標器失效,或者由於雙方距離過近而來不及開啟。隨後巴格雷號立刻還以顏色,對約珊號發射一枚RGM-84D魚叉導彈,不過同一時間溫賴特號與
佩里級護衛艦辛普森號(USS Simpson FFG-56)也對約珊號發射總共五枚標準SM-1/2防空導彈(此導彈在必要時可當短程反艦導彈使用);由於超音速的標準導彈遠快於次音速的魚叉導彈,因此搶先擊中了約珊號。

兩伊戰爭中的約瑟夫·施特勞斯號
當美軍這枚RGM-84D飛抵目標上空時,約珊號的 艦體正迅速下沉,干舷過低,因此這枚導彈從目標上空掠過,在找不到目標的情況下自毀落海。結果在這場罕見的魚叉導彈大對決中,雙方發射的魚叉導彈都未立寸功。在當天下午,兩架美軍A-6E攻擊機與伊朗的1540ton英制MK.5型護衛艦薩漢號(Sahand)交戰,美軍攻擊機先後以兩枚魚叉導彈和數枚雷射導引炸彈命中薩漢號,;隨後,美軍查爾斯·亞當斯級驅逐艦約瑟夫·施特勞斯號(USS Joseph Strauss DDG-16)又以一枚RGM-84D命中該艦,最後滿身瘡痍的Sahand號在當夜沉入波斯灣。

被魚叉導彈擊沉的格魯德(Beir Glulud)號
1986年3月的美利衝突中,美國的魚叉反艦導彈首開實戰記錄。在1986年 3月23日,美國海軍以美利堅號(USS American CV-66)與
珊瑚海號航空母艦(USS Coral Sea CV-43)為首的戰鬥群在利比亞錫德拉灣附近水域進行威嚇演習。在3月24日,美國海軍提康德羅加號(USS Ticonderoga CG-47)導彈巡洋艦與另外兩艘美國艦艇越過利比亞海軍宣布的“死亡線”,進入錫德拉灣;利比亞立刻予以回應,對進入錫德拉灣上空的美國軍機發射
SA-5防空導彈,並派遣戰機攔截,不過並沒有成功。在3月24日晚間,一艘利比亞海軍戰士-IIG級導彈快艇Beir Glulud號利用夜色接近美國艦隊,企圖發動攻擊,然而Beir Glulud號的一舉一動早就被美國海軍密切監視。

約克頓號導彈巡洋艦
在晚間19時25分,
美國號航空母艦派出兩架隸屬V A-55中隊的A-6攻擊機前往攔截這艘利比亞導彈快艇,其中A-6E攻擊機在19時50分發射一枚AGM-84A魚叉導彈並命中Beir Glulud號,使該艇起火併失去戰鬥能力;隨後美軍A-6E飛抵燃燒中的Beir Glulud號上空,投下激光導引的MK-20石眼集術炸彈,迅速將該艇擊沉,艇上27人無一生還。在3月24日午夜左右,宙斯盾巡洋艦約克頓號(USS Yorktown CG-48)發射一枚RGM-84C,擊中一艘先前已經被美國海軍A-6E以石眼集束炸彈擊傷的利比亞努奇卡-2級(Nanuchka II)巡邏艦Ain Zaquit號(舷號419),不過該艦並未沉沒,被利比亞海軍拖回軍港。
2021年6月,來自美國海軍第4巡邏機中隊(VP-4)的P-8A反潛機發射了兩枚AGM-84D“魚叉”反艦導彈,打擊挪威海岸的一艘
靶船。這是美軍P-8A首次在歐洲戰區使用這款
空對艦導彈。
