矢量控制
磁場導向控制
由於非同步電機的動態數學模型是一個高階、非線性、強耦合的多變數系統。上世紀60年代末由達姆斯塔特工業大學(TU Darmstadt)的K.Hasse提出。在70年代初由西門子工程師F.Blaschke在不倫瑞克工業大學(TU Braunschweig)發表的博士論文中提出三相電機磁場定向控制方法,通過非同步電機矢量控制理論來解決交流電機轉矩控制問題。矢量控制實現的基本原理是通過測量和控制非同步電動機定子電流矢量,根據磁場定向原理分別對非同步電動機的勵磁電流和轉矩電流進行控制,從而達到控制非同步電動機轉矩的目的。
矢量控制(vector control)也稱為磁場導向控制(field-oriented control,簡稱FOC),是一種利用變頻器(VFD)控制三相交流電機的技術,利用調整變頻器的輸出頻率、輸出電壓的大小及角度,來控制電機的輸出。其特性是可以個別控制電機的的磁場及轉矩,類似他激式直流電機的特性。由於處理時會將三相輸出電流及電壓以矢量來表示,因此稱為矢量控制。
矢量控制可以適用在交流感應電機及直流無刷電機,早期開發的目的為了高性能的電機應用,可以在整個頻率範圍內運轉、電機零速時可以輸出額定轉矩、且可以快速的加減速。不過相較於直流電機,矢量控制可配合交流電機使用,電機體積小,成本及能耗都較低,因此開始受到產業界的關注。矢量控制除了用在高性能的電機應用場合外,也已用在一些家電的應用中。
利用矢量控制,可以用類似控制他激直流電機的方式控制交流感應電機及同步電機。在他激直流電機中,磁場電流及電樞電流可獨立控制,在矢量控制,控制磁場及電樞的電流互相垂直,理論上不會互相影響,因此當控制轉矩時,不會影響產生磁場的磁鏈,因此可以有快速的轉矩響應。
矢量控制會依照程式中計算的電流矢量,產生三相PWM的電壓提供給電機,目的是要控制電機的三相電流。其中會將電流及電壓等物理量在二個系統之間轉換,一個是隨速度及時間改變的三相系統,另一個則是二軸非線變的旋轉坐標系統。
採用矢量控制方式的通用變頻器不僅可在調速範圍上與直流電動機相匹配,而且可以控制非同步電動機產生的轉矩。由於矢量控制方式所依據的是準確的被控非同步電動機的參數,有的通用變頻器在使用時需要準確地輸入非同步電動機的參數,有的通用變頻器需要使用速度感測器和編碼器。鑒於電機參數有可能發生變化,會影響變頻器對電機的控制性能,並根據辨識結果調整控制演演算法中的有關參數,從而對普通的非同步電動機進行有效的矢量控制。
● 需要量測(或是估測)電機的速度或位置,若估測電機的速度,需要電機電阻及電感等參數,若可能要配合多種不同的電機使用,需要自動調適(autotuning)程序來量測電機參數。
● 藉由調整控制的目標值,轉矩及磁通可以快速變化,一般可以在5-10毫秒內完成。
● 若使用PI控制,步階響應會有過沖。
● 功率晶體的切換頻率(載波)一般為定值。
● 轉矩的精確度和控制系統中使用的電機參數有關,因此若因為電機溫度變化.造成轉子電阻阻值提高.會造成誤差的變大。
● 對處理器效能的要求較高,至少每一毫秒需執行一次電機控制的演演算法。
以非同步電動機的矢量控制為例:
它首先通過電機的等效電路來得出一些磁鏈方程,包括定子磁鏈,氣隙磁鏈,轉子磁鏈,其中氣隙磁鏈是連接定子和轉子的。一般的感應電機轉子電流不易測量,所以通過氣隙來中轉,把它變成定子電流。
然後,有一些坐標變換,首先通過3/2變換,變成靜止的d-q坐標,然後通過前面的磁鏈方程產生的單位矢量來得到旋轉坐標下的類似於直流機的轉矩電流分量和磁場電流分量,這樣就實現了解耦控制,加快了系統的響應速度。
最後再經過2/3變換,產生三相交流電去控制電機,這樣就獲得了良好的性能。
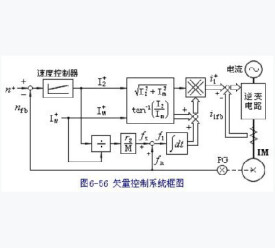
徠矢量控制(VC)方式
矢量控制變頻調速的做法是將非同步電動機在三相坐標系下的定子電流Ia、Ib、Ic、通過三相-二相變換,等效成兩相靜止坐標系下的交流電流Ia1Ib1,再通過按轉子磁場定向旋轉變換,等效成同步旋轉坐標系下的直流電流Im1、It1(Im1相當於直流電動機的勵磁電流;It1相當於與轉矩成正比的電樞電流),然後模仿直流電動機的控制方法,求得直流電動機的控制量,經過相應的坐標反變換,實現對非同步電動機的控制。
其實質是將交流電動機等效為直流電動機,分別對速度,磁場兩個分量進行獨立控制。通過控制轉子磁鏈,然後分解定子電流而獲得轉矩和磁場兩個分量,經坐標變換,實現正交或解耦控制。
綜合以上:矢量控制無非就四個知識:等效電路、磁鏈方程、轉矩方程、坐標變換(包括靜止和旋轉)。
矢量控制方法的提出具有劃時代的意義。然而在實際應用中,由於轉子磁鏈難以準確觀測,系統特性受電動機參數的影響較大,且在等效直流電動機控制過程中所用矢量旋轉變換較複雜,使得實際的控制效果難以達到理想分析的結果。
基本信息
- 中文名
- 矢量控制
- 外文名
- vector control
- 年代
- 70年代
- 性質
- 控制