步進電機驅動器
將電脈衝轉化為角位移的執行機構
步進電機驅動器是一種將電脈衝轉化為角位移的執行機構。當步進驅動器接收到一個脈衝信號,它就驅動步進電機按設定的方向轉動一個固定的角度(稱為“步距角”),它的旋轉是以固定的角度一步一步運行的。可以通過控制脈衝個數來控制角位移量,從而達到準確定位的目的;同時可以通過控制脈衝頻率來控制電機轉動的速度和加速度,從而達到調速和定位的目的。
步進電動機和步進電動機驅動器構成步進電機驅動系統。步進電動機驅動系統的性能,不但取決於步進電動機自身的性能,也取決於步進電動機驅動器的優劣。對步進電動機驅動器的研究幾乎是與步進電動機的研究同步進行的。
步進電機按結構分類:步進電動機也叫脈衝電機,包括反應式步進電動機(VR)、永磁式步進電動機(PM)、混合式步進電動機(HB)等。
(1)反應式步進電動機:也叫感應式、磁滯式或磁阻式步進電動機。其定子和轉子均由軟磁材料製成,定子上均勻分佈的大磁極上裝有多相勵磁繞組,定、轉子周邊均勻分佈小齒和槽,通電后利用磁導的變化產生轉矩。一般為三、四、五、六相;可實現大轉矩輸出(消耗功率較大,電流最高可達20A,驅動電壓較高);步距角小(最小可做到10’);斷電時無定位轉矩;電機內阻尼較小,單步運行(指脈衝頻率很低時)震蕩時間較長;啟動和運行頻率較高。
(2)永磁式步進電動機:通常電機轉子由永磁材料製成,軟磁材料製成的定子上有多相勵磁繞組,定、轉子周邊沒有小齒和槽,通電后利用永磁體與定子電流磁場相互作用產生轉矩。一般為兩相或四相;輸出轉矩小(消耗功率較小,電流一般小於2A,驅動電壓12V);步距角大(例如7.5度、15度、22.5度等);斷電時具有一定的保持轉矩;啟動和運行頻率較低。
(3)混合式步進電動機:也叫永磁反應式、永磁感應式步進電動機,混合了永磁式和反應式的優點。其定子和四相反應式步進電動機沒有區別(但同一相的兩個磁極相對,且兩個磁極上繞組產生的N、S極性必須相同),轉子結構較為複雜(轉子內部為圓柱形永磁鐵,兩端外套軟磁材料,周邊有小齒和槽)。一般為兩相或四相;須供給正負脈衝信號;輸出轉矩較永磁式大(消耗功率相對較小);步距角較永磁式小(一般為1.8度);斷電時無定位轉矩;啟動和運行頻率較高;發展較快的一種步進電動機。
步進電機驅動器
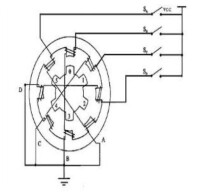
步進電機驅動器的原理,採用單極性直流電源供電。只要對步進電機的各相繞組按合適的時序通電,就能使步進電機步進轉動。圖1是該四相反應式步進電機工作原理示意圖。
步進電機驅動器
步進電機驅動器
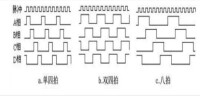
單四拍、雙四拍與八拍工作方式的電源通電時序與波形分別如圖2.a、b、c所示。
驅動器相當於開關的組合單元。通過上位機的脈衝信號有順序給電機相序通電使電機轉動。
步進電機驅動器主要結構主要有以下部分
根據輸入信號的要求產生電機在不同狀態下的開關波形信號處理
對環行分配器產生的開關信號波形進行PWM調製以及對相關的波形進行濾波整形處理3:推動級:對開關信號的電壓,電流進行放大提升主開關電路
用功率元器件直接控制電機的各相繞組
當繞組電流過大時產生關斷信號對主迴路進行關斷,以保護電機驅動器和電機繞組
對電機的位置和角度進行實時監控,傳回信號的產生裝置
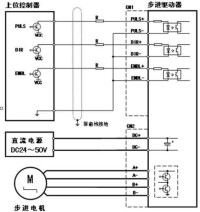
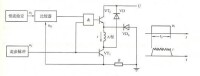
步進電機不能直接接到工頻交流或直流電源上工作,而必須使用專用的驅動器,如圖所示,它由脈衝發生控制單元、功率驅動單元、保護單元等組成。圖中點劃線所包圍的二個單元可以用微機控制來實現。驅動單元必須與驅動器直接耦合(防電磁干擾),也可理解成微機控制器的功率介面,這裡予以簡單介紹。
1.單電壓功率驅動
步進電機驅動器
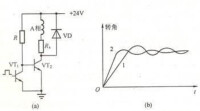
電路如圖所示。在電機繞組迴路中串有電阻Rs,使電機迴路 雙電壓功率驅動介面
時間常數減小,高頻時電機能產生較大的電磁轉矩,還能緩解電機的低頻共振現象,但它引起附加的損耗。一般情況下,簡單單電壓驅動線路中,Rs是不可缺少的。Rs步進電機單步響應的改善如圖3(b)。
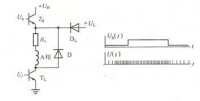
2.雙電壓功率驅動
雙電壓驅動的功率介面如圖4所示。雙電壓驅動的基本思路是在較低(低頻段)用較低的電壓UL驅動,而在高速(高頻段)時用較高的電壓UH驅動。這種功率介面需要兩個控制信號,Uh為高壓有效控制信號,U為脈衝調寬驅動控制信號。圖中,功率管TH和二極體DL構成電源轉換電路。當Uh低電平,TH關斷,DL正偏置,低電壓UL對繞組供電。反之Uh高電平,TH導通,DL反偏,高電壓UH對繞組供電。這種電路可使電機在高頻段也有較大出力,而靜止鎖定時功耗減小。
3.高低壓功率驅動
步進電機驅動器
工作頻率如何,均利用高電壓UH供電來提高導通相繞組的電流前沿,而在前沿過後,用低電壓UL來維持繞組的電流。這一作用同樣改善了驅動器的高頻性能,而且不必再串聯電阻Rs,消除了附加損耗。高低壓驅動功率介面也有兩個輸入控制信號Uh和Ul,它們應保持同步,且前沿在同一時刻跳變,如圖所示。圖中,高壓管VTH的導通時間tl不能太大,也不能太小,太大時,電機電流過載;太小時,動態性能改善不明顯。一般可取1~3ms。(當這個數值與電機的電氣時間常數相當時比較合適)。
4.斬波恆流功率驅動
恆流驅動的設計思想是,設法使導通相繞組的電流不論在鎖定、低頻、高頻工作時均保持固定數值。使電機具有 圖6 斬波恆流功率驅動介面
步進電機驅動器
斬波恆流功率驅動介面也有兩個輸入控制信號,其中u1是數字脈衝,u2是模擬信號。這種功率介面的特點是:高頻響應大大提高,接近恆轉矩輸出特性,共振現象消除,但線路較複雜。相應的集成功率模塊可供採用。
5.升頻升壓功率驅動
為了進一步提高驅動系統的高頻響應,可採用升頻升壓功率驅動介面。這種介面對繞組提供的電壓與電機的運行頻率成線性關係。它的主迴路實際上是一個開關穩壓電源,利用頻率-電壓變換器,將驅動脈衝的頻率轉換成直流電平,並用此電平去控制開關穩壓電源的輸入,這就構成了具有頻率反饋的功率驅動介面。
6.集成功率驅動
步進電機驅動器
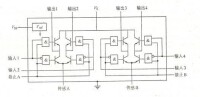
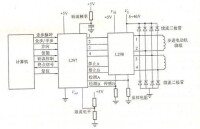
L298晶元是一種H橋式驅動器,它設計成接受標準TTL邏輯電平信號,可用來驅動電感性負載。H橋可承受46V電壓,相電流高達2.5A。L298(或XQ298,SGS298)的邏輯電路使用5V電源,功放級使用5~46V電壓,下橋發射極均單獨引出,以便接入電流取樣電阻。L298(等)採用15腳雙列直插小瓦數式封裝,工業品等級。它的內部結構如圖7所示。H橋驅動的主要特點是能夠對電機繞組進行正、反兩個方向通電。L298特別適用於對二相或
步進電機驅動器

基本信息
- 中文名
- 步進電機驅動器
- 別名
- 脈衝電機
- 目的
- 調速和定位
- 組成
- 環行分配器、保護電路、感測器
- 定義
- 一種將電脈衝轉化為角位移的執行機構
- 分類
- 反應式步進電動機、永磁式步進電動機、混合式步進電動機