聚束
聚束
聚束模式是合成孔徑雷達最主要的工作模式之一,在這種模式下,由於天線波束始終指向固定的成像區域,使得合成孔徑積累時間得以延長,因此可獲得很高的解析度。極坐標格式成像演演算法最早是作為一種有效的旋轉目標成像方法提出的,但很快就被成功地應用於聚束模式成像中,並且大大地提高了聚束的聚焦成像範圍,因此該演演算法在早期的聚束系統中得到了相當廣泛的應用,同時也是聚束中獲得深入研究的一種較成熟的成像演演算法。
美國Sandia實驗室的Lynx高解析度SAR系統中,聚束模式的成像解析度可達0.1m,所用的成像演演算法就是一種改進的極坐標格式成像演演算法。這種演演算法的基本思想早在20世紀80年代就已提出,但在Lynx SAR系統中才真正得以實現,其基本思想是將二維插值中的距離方向的插值,通過調整信號頻率、脈衝發射時間和A/D採樣率等硬體方法來實現,得到回波採樣就是完成距離插值的信號,方位向採用Chirp Z變換來代替插值和IFFT的壓縮過程。因而整個處理過程不再需要任何插值操作,使聚束成像得以實時實現。
合成孔徑成像雷達具有全天時、全天候、作用距離遠及解析度高等特點,能夠大大提高戰場的信息獲取能力。國內對條帶SAR的研究已經比較成熟,對條帶SAR的成像演演算法以及基於數據的運動補償演演算法都進行了充分的研究,得到了比較理想的成像結果。隨著SAR解析度的不斷增加,聚束SAR的成像及運動補償的研究成為近年來SAR研究的一個熱點之一。聚束SAR成像模式是通過控制天線照射地面固定區域來增加合成孔徑的累積時間,從而獲得很高的方位向解析度。與條帶SAR相比,聚束SAR模式下合成孔徑時間大大增加,這要求更加精細的運動補償演演算法。如何對聚束SAR進行運動補償是聚束SAR成像的一個關鍵技術,國外在聚束SAR成像中主要利用高精度的慣導系統和GPS定位系統輸出的運動參數來控制載機和天線波束的平穩性,並且通過慣導和GPS數據對SAR回波數據進行預先補償,然後進行自聚焦處理獲得高質量的聚束SAR圖像。
針對國內SAR研究現狀,特別是在天線指向不穩定以及慣導精度不高的情況下,聚束SAR運動補償的效果受到很大限制。因此,研究詳細推導了飛行載體的非理想運動引入的運動誤差模型並分析其對成像質量的影響,提出了一種有效的基於回波數據的運動補償方法,結合經典的極坐標演演算法,從飛機位置誤差的估計、距離向相位誤差的估計以及殘餘包絡誤差的估計3方面進行了運動補償,實測數據表明該方法具有良好的運動補償效果,成像質量有較大提高。
載機在空中的運動誤差按照對SAR成像的影響可以分為兩類,即影響天線相位中心到目標距離,以及不影響天線相位中心到目標距離的運動誤差。其中前一種運動誤差會影響回波的多普勒中心頻率以及多普勒調頻率,使得方位向處理困難;后一種的運動誤差會影響天線波束的照射區域,在圖像上表現為圖像灰度和信噪比的變化,但並不影響圖像的聚焦。
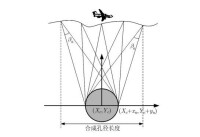
圖 1 聚束 SAR 示意圖
載機的偏航和俯仰運動引起圖像的散焦,使回波的多普勒中心和多普勒調頻率隨時間變化,造成方位向處理的困難。因此基於回波數據的運動補償主要是從原始數據中獲得時變的多普勒信息,從而去除載機偏航和俯仰的影響。在成像幾何關係中,我們只考慮斜平面的情況,聚束 SAR 工作模式的示意圖如圖 1 所示。
在上一節中,分析了載機運動引入的誤差對成像的影響,本節提出一種基於原始數據的運動補償技術。聚束SAR 的運動補償主要包括下面3 個方面:飛機位置誤差的估計、距離向相位誤差的估計以及殘餘包絡誤差的估計。由於經典極坐標演演算法是聚束SAR 成像的一種快速有效的演演算法,本節將結合極坐標演演算法討論聚束 SAR 的運動補償問題。
(1)飛機位置誤差的估計
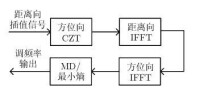
圖 2 子孔徑內調頻率估計流程圖
(2)距離向相位誤差的估計
在高解析度 SAR 中(如解析度小於 0.2 m),距離向信號的帶寬非常寬,雷達信號經發射、調製、接收及 AD 採樣量化后,形成數字信號。然而,在沒有採用去斜接收技術的接收機中,要使接收機在1 GHz 以上的頻帶寬度內有平坦的幅度響應及非常小的相頻響應(通常要求小於π/4 ),是不現實的。此外距離向的線性調頻信號一般是用 DDS 產生的,要使信號始終保持理想的線性調頻是非常困難的,實際中如此大帶寬的線性調頻信號其相位並不是非常穩定的,通常會隨著時間做緩慢的變化。上面的兩個原因都會引起接收后的信號在距離向上產生畸變,影響壓縮效果。在有的系統中,採用了記錄接收機的漏信號波形的方法來改善距離向壓縮的效果。但有時系統並沒有記錄這樣的漏信號,這就需要從信號中提取距離向相位誤差。在高解析度聚束 SAR 成像中,可以採用 PGA演演算法對系統的相頻響應進行辨識,在辨識中必須要補償載機的非理想運動,來提高精度。
(3)殘餘包絡誤差的估計
經過距離向相位估計以及載機位置誤差估計后,進行極坐標演演算法的方位向插值操作,但此時距離向壓縮信號的包絡仍然存在誤差,這會影響成像的效果。此時包絡誤差主要由下面兩個原因引起:其一是由於在載機位置估計中採用了兩次積分的形式,在兩次積分中初值都選為零,這樣不能估計載機非理想運動引入的線性的位置誤差,當這種線性位置誤差超過一個距離門時,會引起包絡誤差;另外一個因素是利用子孔徑的方法來估計多普勒調頻率時,由於受子孔徑大小的限制,使估計值存在誤差,經過二次積分后,產生殘餘的包絡誤差。
由於在 SAR 圖像中存在一些強散射的孤立點,因此可以根據這些特顯點來跟蹤信號包絡的變化,其基本思想與 PPP自聚焦演演算法有些相似。在實際中採用如下的步驟來進行殘餘包絡誤差的估計:
(1)先進行方位向 IFFT 變換,對數據進行成像。
(2)將圖像分成子塊:如 32×64 大小。以每個子塊的最大值與中值的比作為選擇孤立點的標準,選擇若干個特顯點。
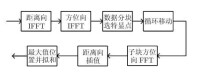
圖 3 殘餘包絡誤差估計流程圖
(4)將第3 步得到的圖像,距離向進行插值后,求出每個方位向上的最大值的位置。
(5)將所得到的曲線用多項式進行擬合,來求出殘餘包絡誤差。

圖4 實測聚束 SAR 成像結果
由於合成孔徑時間比較長,大約 20s,飛機在合成孔徑時間內存在很大的位置誤差,並且沒有採用去斜接收技術,接收機的帶寬需大於 1 GHz,在接收機帶寬內存在相頻誤差,在信號處理中應予以補償。對實測聚束 SAR 的成像結果圖4所示。
圖中的成像結果表明,利用文中提出的運動補償方法能夠準確估計出載機的位置誤差、距離向的相位誤差和殘餘包絡誤差,與未進行運動補償的圖像相比,聚焦效果顯著增強,圖像質量明顯提高。
在地震資料處理中,如何有效地消除多次波等相關雜訊是一個長期存在的複雜問題。人們為此提出了多種去噪方法,在現行的地震資料處理系統中,較為常用的有f 一k 方法和拉冬變換方法。但是這些方法也受到使用條件的限制,尤其在地質情況較複雜地區的三維地震資料處理中,往往難以得到令人滿意的去噪效果,影響資料信噪比的提高和精確的速度分析與偏移成像。
Hayikn對源於雷達和聲納信號處理的聚束濾波方法給出了很好的概括和總結。Hu和White詳細介紹了二維最小方差無偏聚束濾波方法在地震資料處理中消除多次波的理論和實例。Hu等運用聚束濾波方法處理我國陸地和海上的實際資料也取得了很好的效果。Hong等給出了三維聚束濾波方法的初步研究成果。
為了在三維資料中更好地描述一次波和多次波的時間特性,採用四個參數(零炮檢距雙程旅行時間、速度、傾角和方位角)來確定一次波和多次波三維動校正雙曲時距曲面。前兩個參數與二維時距曲線相同,后兩個參數是對三維時距關係的修正。方位角可以通過觀測系統得到。為研究傾斜地層構成的複雜構造,通過對幾個給定傾角的嘗試,採用最優化方法使得動校正曲線與實際曲線最佳擬合來確定地層傾角。這樣三維聚束濾波方法就可以用於實際的地震資料處理。
聚束濾波方法的最大優點是它服從多重約束可以自我修正,而且還可以對濾波性能進行直接控制,因而其濾波效果很容易通過經驗測試的方法檢測和優化。通過每一個約束引人一個參數調節平衡點,控制了信號畸變和雜訊的增益。三維聚束濾波方法引入四個參數(零炮檢距雙程旅行時間、速度、傾角和方位角)來描述一次波與多次波 等相關雜訊三維動校正時距關係,然後根據信號與相關雜訊同相軸在時間上的差異,消除來自反射平面外部和內部的各種相關雜訊。合成資料試驗結果證明,三維聚束濾波方法能夠有效地消除反射平面外的相關雜訊同相軸;對實際三維地震資料的應用進一步表明,虛假層位可以通過有效消除相關雜訊的同相軸來清除。
基本信息
- 外文名
- beam stacking