平面連桿機構
若干構件用低副連接組成的結構
平面連桿機構是由若干構件用低副(轉動副、移動副)連接組成的平面機構。最簡單的平面連桿機構由四個構件組成,稱為平面四桿機構。平面連桿機構廣泛應用於各種機械、儀錶和各種機電產品中。
平面連桿機構
最簡單地平面連桿機構是由四個構建組成地,稱為平面四桿機構。它的應用非常廣泛,而且是組成多桿機構的基礎。
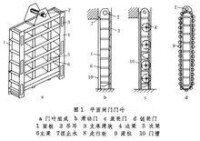
由若干個剛性構件通過低副(轉動副、移動副)聯接,且各構件上各點的運動平面均相互
平行的機構(圖1),又稱平面低副機構。低副具有壓強小、磨損輕、易於加工和幾何形狀能保證本身封閉等優點,故平面連桿機構廣泛用於各種機械和儀器中。與高副機構相比,它難以準確實現預期運動,設計計算複雜。
平面連桿機構中最常用的是四桿機構,它的構件數目最少,且能轉換運動。多於四桿的平面連桿機構稱多桿機構,它能實現一些複雜的運動,但桿多且穩定性差。
平面連桿機構的運動設計一般可歸納為以下三類基本問題: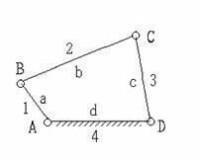 1)實現構件給定位置(亦稱剛體導引),即要求連桿機構能引導某構件按規定順序精確或近似地經過給定的若干位置。
1)實現構件給定位置(亦稱剛體導引),即要求連桿機構能引導某構件按規定順序精確或近似地經過給定的若干位置。
平面連桿機構
2)實現已知運動規律(亦稱函數生成),即要求主、從動件滿足已知的若干組對應位置關係,包括滿足一定的急回特性要求,或者在主動件運動規律一定時,從動件能精確或近似地按給定規律運動。
3)實現已知運動軌跡(亦稱軌跡生成),即要求連桿機構中作平面運動的構件上某一點精確或近似地沿著給定的軌跡運動。
在進行平面連桿機構運動設計時,往往是以上述運動要求為主要設計目標,同時還要兼顧一些運動特性和傳力特性等方面的要求,如整轉副要求、壓力角或傳動角要求、機構佔據空間位置要求等。另外,設計結果還應滿足運動連續性要求,即當主動件連續運動時,從動件也能連續地佔據預定的各個位置,而不能出現錯位或錯序等現象。
平面連桿機構運動設計的方法主要是幾何法和解析法,此外還有圖譜法和模型實驗法。幾何法是利用機構運動過程中各運動副位置之間的幾何關係,通過作圖獲得有關運動尺寸,所以幾何法直觀形象,幾何關係清晰,對於一些簡單設計問題的處理是有效而快捷的,但由於作圖誤差的存在,所以設計精度較低。解析法是將運動設計問題用數學方程加以描述,通過方程的求解獲得有關運動尺寸,故其直觀性差,但設計精度高。隨著數值計算方法的發展和計算機的普及應用,解析法已成為各類平面連桿機構運動設計的一種有效方法。
按給定的從動件運動來決定機構運動簡圖的尺寸。綜合時尚應考慮最小傳動角和曲柄存在等條件,以保證求得合理可靠的機構。
對從動件的運動要求是多種多樣的,要綜合的問題也各不相同。一般可歸結為:①主動件運動規律一定時,要求從動件能實現給定的對應位置或近似實現給定函數的運動規律;②要求連桿能實現給定的位置;③要求連桿上某點能近似沿給定曲線運動。其中②是研究運動幾何學的基本問題,據此也可求解近似實現給定曲線的機構。
尺寸綜合的主要方法有解析法、圖解法和實驗法。①解析法:以函數逼近論為基礎的代數法。這種方法精度高,計算繁複,但隨著電子計算機的應用和向量、複數與矩陣等數學手段的運用,60年代以來發展很快,常用的有插值法、平方逼近法、最佳逼近法等。②圖解法:以運動幾何學為基礎的幾何方法。這種方法概念明確、簡單,能以一定精度求解相當範圍的問題,但精度不如解析法高,常用的有運動幾何法和在其基礎上提出的半形轉動法等。③實驗法:用不同機構參數的模型通過反覆實驗求解機構的尺寸(見機構綜合)。
羅伯茨定理若三個不同尺寸的鉸鏈四桿機構O1O2B1A1、O2O3B2A2和O1O3B3A3(圖3)間有下列關係:①O1A1ΜA3、O2B1ΜA2和O3B3ΜB2是鉸鏈平行四邊形;②ΔA1ΜB1∽ΔΜB2A2∽ΔA3B3Μ∽ΔO1O2O3,則在各自連桿上的Μ點可畫出同一條曲線,稱為羅伯茨定理。在綜合再現給定軌跡的鉸鏈四桿機構時,當設計出的機構不能滿足傳動角大小和安裝位置等其他條件時,用羅伯茨定理可得出另兩個不同尺寸的機構,以利於選擇。
平面鉸鏈四桿機構根據其兩連架桿的運動形式不同,可分為雙曲柄機構、曲柄搖桿機構和雙搖桿機構三種基本形式。
連架桿均為曲柄的四桿機構,稱為雙曲柄機構。圖8.3所示的慣性篩機構是雙曲柄機構。它由曲柄1、3、連桿2、5、機架4和篩6組成,當曲柄1等速迴轉時,另一曲柄3變速迴轉,使篩6具有所需的加速度,利用加速度所產生的慣性力,使物料在篩上往複運動而達到篩選的目的。
兩連架桿中一個為曲柄,另一個為搖桿的四桿機構,稱為曲柄搖桿機構。圖8.4所示的雷達天線俯仰角調整機構就是曲柄搖桿機構。天線固定在連架搖桿3上,由主動曲柄1通過連桿2使天線緩緩擺動,要求實現一定的擺角,以保證天線具有指定的擺動角。
兩連架桿均為搖桿的四桿機構稱為雙搖桿機構。圖8.5所示的汽車前輪轉向機構就是雙搖桿機構。
(1)連架桿或機架為最短桿;
(2)最短桿與最長桿長度之和小於或等於其他兩桿長度之和。
在有整轉副即曲柄存在的鉸鏈四桿機構中,最短桿兩端的轉動副均為整轉副,因此:若取最短桿為機架,則得雙曲柄機構;若取最短桿的任一相鄰的構件為機架,則得曲柄搖桿機構;若取最短桿對邊為機架,則得雙搖桿機構。
若鉸鏈四桿機構最短桿與最長桿長度之和大於其他兩桿長度之和,則無曲柄存在,兩連架桿均為搖桿。但此時這種情況下形成的雙搖桿機構與上述雙搖桿機構不同,它不存在整轉副。
平面連桿機構廣泛應用於各種機械和儀錶中,其主要優點有:
1)由於連桿機構中的運動副都是面接觸的低副,因而承受的壓強小,便於潤滑,磨損較輕,承載能力高;
2)構件形狀簡單,加T方便,構件之間的接觸是由構件本身的幾何約束來保持的,故構件工作可靠;
3)可實現多種運動形式之間的變換:
4)利用連桿可實現多種運動軌跡的要求。
其缺點有:
1)低副中存在間隙,構件數目較多時會產生較大的累積運動誤差,從而降低運動精度,效率低;
2)機構運動時產生的慣性力難以平衡,故不適宜於高速場合。
平面連桿機構的類型很多,從組成機構的桿件數來看有四桿機構、五桿機構和六桿機構等,一般將由五個或五個以上的構件組成的連桿機構稱為多桿機構。

基本信息
- 中文名
- 平面連桿機構
- 別名
- Planar linkage
- 出處
- 機械設計基礎、機械工程概論等
- 分類
- 四桿機構和多桿機構
- 性質
- 一種傳動裝置結構