SVPWM
SVPWM
SVPWM的主要思想是以三相對稱正弦波電壓供電時三相對稱電動機定子理想磁鏈圓為參考標準,以三相逆變器不同開關模式作適當的切換,從而形成PWM波,以所形成的實際磁鏈矢量來追蹤其準確磁鏈圓。傳統的SPWM方法從電源的角度出發,以生成一個可調頻調壓的正弦波電源,而SVPWM方法將逆變系統和非同步電機看作一個整體來考慮,模型比較簡單,也便於微處理器的實時控制。
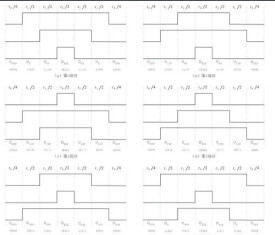
普通的三相全橋是由六個開關器件構成的三個半橋。這六個開關器件組合起來(同一個橋臂的上下半橋的信號相反)共有8種安全的開關狀態. 其中000、111(這裡是表示三個上橋臂的開關狀態)這兩種開關狀態在電機驅動中都不會產生有效的電流。因此稱其為零矢量。另外6種開關狀態分別是六個有效矢量。它們將360度的電壓空間分為60度一個扇區,共六個扇區,利用這六個基本有效矢量和兩個零量,可以合成360度內的任何矢量。
當要合成某一矢量時先將這一矢量分解到離它最近的兩個基本矢量,而後用這兩個基本矢量去表示,而每個基本矢量的作用大小就利用作用時間長短去代表。用電壓矢量按照不同的時間比例去合成所需要的電壓矢量。從而保證生成電壓波形近似於正弦波。
在變頻電機驅動時,矢量方向是連續變化的,因此需要不斷的計算矢量作用時間。為了計算機處理的方便,在合成時一般是定時器計算(如每0.1ms計算一次)。這樣只要算出在0.1ms內兩個基本矢量作用的時間就可以了。由於計算出的兩個時間的總和可能並不是0.1ms(比這小),而那剩下的時間就按情況插入合適零矢量。由於在這樣處理時,合成的驅動波形和PWM很類似。因此還叫它PWM,又因這種PWM是基於電壓空間矢量去合成的,所以就叫它SVPWM了。
SVPWM與PWM、SPWM的比較
PWM:脈衝寬度調製(PWM),晶體管(常用MOS、IGBT等全控型器件)工作在開關狀態,晶體管被觸發導通時,電源電壓加到電動機上;晶體管關斷時,直流電源與電動機斷開;這樣通過改變晶體管的導通時間(即調占空比ton)就可以調節電機電壓,從而進行調速。
對比SVPWM的產生原理可知,SVPWM本身的產生原理與PWM沒有任何關係,只是形似。
SPWM:正弦波脈寬調製,將正弦半波N等分,把每一等分的正弦曲線與橫軸所包圍的面積用一個與此面積相等的等高矩形脈衝來替代。三角波載波信號Ut與一組三相對稱的正弦參考電壓信號Ura、Urb、Urc比較后,產生的SPWM脈衝序列波Uda 、Udb、Udc作為逆變器功率開關器件的驅動控制信號。逆變器輸出電壓的基波正是調製時所要求的正弦波,調節正弦波參考信號的幅值和頻率就可以調節SPWM逆變器輸出電壓的幅值和頻率。
SVPWM與SPWM的原理和來源有很大不同,但是他們卻是殊途同歸的。SPWM由三角波與正弦波調製而成,而SVPWM卻可以看作由三角波與有一定三次諧波含量的正弦基波調製而成,這點可以從數學上證明。
SVPWM的主要特點有:
1.在每個小區間雖有多次開關切換,但每次開關切換隻涉及一個器件,所以開關損耗小。
2.利用電壓空間矢量直接生成三相PWM波,計算簡單。
3.逆變器輸出線電壓基波最大值為直流側電壓,比一般的SPWM逆變器輸出電壓高15%
基本信息
- 形式
- 三相逆變器不同開關模式
- 性質
- 微處理器的實時控制
- 中文名
- 空間矢量脈寬調製
- 外文名
- Space Vector Pulse Width Modulation