測速原理
測速原理
這種方法比較經典,檢測效果也不錯。如我國南方,如上海、廣東等地區多採用此法。根據車輛經過平行線圈的速度來判斷是否超速,並攝像取證。該檢測方法的缺點是在於地面埋設的感應線圈的施工量大,路面一旦變更則需重埋線圈,另外高緯度開凍期和低緯度夏季路面以及路面質量不好的地方對線圈的維護工作都是巨大的。

測速原理
微波雷達
超聲波測距原理:通過超聲波發射裝置發出超聲波,根據接收器接到超聲波時的時間差就可以知道距離了。這與雷達測距原理相似。超聲波發射器向某一方向發射超聲波,在發射時刻的同時開始計時,超聲波在空氣中傳播,途中碰到障礙物就立即返回來,超聲波接收器收到反射波就立即停止計時。(超聲波在空氣中的傳播速度為340m/s,根據計時器記錄的時間t,就可以計算出發射點距障礙物的距離(s),即:s=340t/2)。超聲波感測頭在路口這種灰塵極大的惡劣環境中使用壽命最多也就幾周,因此檢測方法不適用。
紅外線和激光檢測有類似之處,由於激光有點測量行為,從理論上講時可行的並且檢測過程都相當高,但與微波雷達相比,同樣面臨路口多,道路多,車輛多,行人多的影響,點測量效率無法滿監管要求,最重要的是:激光檢測中的激光束對人體主要是人眼的傷害是其在尤為嚴重的問題。在歐美等國家又用激光測速的交通測速儀器,其性能指標不僅要達到國際安全標準,同時在使用中必須人工操控,以避免多人眼造成傷害。在日本是嚴格禁止用激光檢測設備的,因此激光檢測在理論上又是較好,但目前在使用過程中的安全問題仍未解決。

基本信息
- 中文名
- 測速原理
- 外文名
- Speed measuring principle
- 微波雷達
- 區別與視頻檢測
- 聲波檢測
- 利用超聲波測距原理
- 激光檢測
- 激光有點測量行為
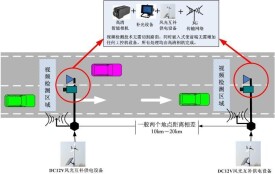
- 視頻檢測
- 對連續視頻圖像的分析
- 線圈測速
- 地面埋設的感應線圈的施工量大