機器人感測器
機器人感測器
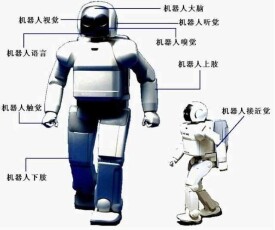
機器人是由計算機控制的複雜機器,它具有類似人的肢體及感官功能;動作程序靈活;有一定程度的智能;在工作時可以不依賴人的操縱。機器人感測器在機器人的控制中起了非常重要的作用,正因為有了感測器,機器人才具備了類似人類的知覺功能和反應能力。
為了檢測作業對象及環境或機器人與它們的關係,在機器人上安裝了觸覺感測器、視覺感測器、力覺感測器、接近覺感測器、超聲波感測器和聽覺感測器,大大改善了機器人工作狀況,使其能夠更充分地完成複雜的工作。由於外部感測器為集多種學科於一身的產品,有些方面還在探索之中,隨著外部感測器的進一步完善,機器人的功能越來越強大,將在許多領域為人類做出更大貢獻。
根據檢測對象的不同可分為內部感測器和外部感測器。
a.內部感測器:用來檢測機器人本身狀態(如手臂間角度)的感測器。多為檢測位置和角度的感測器。
b.外部感測器:用來檢測機器人所處環境(如是什麼物體,離物體的距離有多遠等)及狀況(如抓取的物體是否滑落)的感測器。具體有物體識別感測器、物體探傷感測器、接近覺感測器、距離感測器、力覺感測器,聽覺感測器等。
檢測內容:是否有光,亮度多少
應用目的:判斷有無對象,並得到定量結果
感測器件:光敏管、光電斷續器
檢測內容:對象的色彩及濃度
應用目的:利用顏色識別對象的場合
感測器件:彩色攝像機、濾波器、彩色CCD
檢測內容:物體的位置、角度、距離
應用目的:物體空間位置、判斷物體移動
感測器件:光敏陣列、CCD等
檢測內容:物體的外形
應用目的:提取物體輪廓及固有特徵,識別物體
感測器件:光敏陣列、CCD等
檢測內容:與對象是否接觸,接觸的位置
應用目的:確定對象位置,識別對象形態,控制速度,安全保障,異常停止,尋徑
感測器件:光電感測器、微動開關、薄膜特點、壓敏高分子材料
檢測內容:對物體的壓力、握力、壓力分佈
應用目的:控制握力,識別握持物,測量物體彈性
感測器件:壓電元件、導電橡膠、壓敏高分子材料
檢測內容:機器人有關部件(如手指)所受外力及轉矩
應用目的:控制手腕移動,伺服控制,正解完成作業
感測器件:應變片、導電橡膠
檢測內容:對象物是否接近,接近距離,對象面的傾斜
應用目的:控制位置,尋徑,安全保障,異常停止
感測器件:光感測器、氣壓感測器、超聲波感測器、電渦流感測器、霍爾感測器
檢測內容:垂直握持面方向物體的位移,重力引起的變形
應用目的:修正握力,防止打滑,判斷物體重量及表面狀態
感測器件:球形接點式、光電旋轉感測器、角編碼器、振動檢測器
20世紀50年代後期出現,發展十分迅速,是機器人中最重要的感測器之一。
機器視覺從20世紀60年代開始首先處理積木世界,後來發展到處理室外的現實世界。20世紀70年代以後,實用性的視覺系統出現了。
視覺一般包括三個過程:圖像獲取、圖像處理和圖像理解。相對而言,圖像理解技術還很落後。
機器人力感測器就安裝部位來講,可以分為關節力感測器、腕力感測器和指力感測器。
國際上對腕力感測器的研究是從20世紀70年代開始的,主要研究單位有美國的DRAPER實驗室、SRI研究所、IBM公司和日本的日立公司、東京大學等單位。
作為視覺的補充,觸覺能感知目標物體的表面性能和物理特性:柔軟性、硬度、彈性、粗糙度和導熱性等。
觸覺研究從20世紀80年代初開始,到20世紀90年代初已取得了大量的成果。
研究它的目的是使機器人在移動或操作過程中獲知目標(障礙)物的接近程度,移動機器人可以實現避障,操作機器人可避免手爪對目標物由於接近速度過快造成的衝擊。
(1)特定人的語音識別系統
特定人語音識別方法是將事先指定的人的聲音中的每一個字音的特徵矩陣存儲起來,形成一個標準模板(或叫模板),然後再進行匹配。它首先要記憶一個或幾個語音特徵,而且被指定人講話的內容也必須是事先規定好的有限的幾句話。特定人語音識別系統可以識別講話的人是否是事先指定的人,講的是哪一句話。
(2)非特定人的語音識別系統
非特定人的語音識別系統大致可以分為語言識別系統,單詞識別系統,及數字音(0~9)識別系統。非特定人的語音識別方法則需要對一組有代表性的人的語音進行訓練,找出同一詞音的共性,這種訓練往往是開放式的,能對系統進行不斷的修正。在系統工作時,將接收到的聲音信號用同樣的辦法求出它們的特徵矩陣,再與標準模式相比較。看它與哪個模板相同或相近,從而識別該信號的含義。