子午儀衛星導航系統
子午儀衛星導航系統
子午儀衛星導航系統一種是覆蓋全球的無線電導航系統。其原理是利用多顆低軌道導航衛星提供的導航信號來測定船位。
目錄
午儀衛星導航系統( ),球、衛星導航系統,稱衛星導航
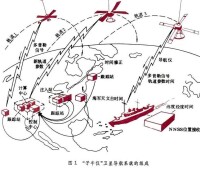
圖1 子午儀衛星導航系統的組成
系統組“午儀”衛星導航系統衛星網、跟蹤站、計算、注站、美國海軍天文台和用戶接收設備等6部分組成。①衛星網:使用4~5顆衛星,均為近極軌道。衛星軌道約1000公里,運行周期約107分鐘。衛星上的主要設備有:注入信號接收機、存儲器、高穩定石英晶體振蕩器、導航信號發射器、天線和太陽電池等。②地面跟蹤站:共4個,各由定向天線跟蹤衛星,接收從衛星發來的信號並進行解調,進行記錄並將數據連同時間修正量傳送到計算中心。③計算中心:根據各跟蹤站送來的數據,計算出每顆衛星未來16小時內在世界時偶數分鐘開始時刻的位置,即衛星固定軌道參數和可變軌道參數,經編碼後送往注入站。④注入站:對數據進行存儲,數據注入每12小時進行一次,以替代衛星中原存的數據,並修正衛星上的時間信號。⑤美國海軍天文台:接收衛星在偶數分鐘時刻的時間同步信號,與世界時比對后,將時差值送入計算中心,使衛星、跟蹤站、計算中心、注入站和用戶設備的時間同步。⑥用戶接收設備:分雙頻道和單頻道兩種,前者用於定位準確度要求高的場合,後者用於一般場合。
定位原理 衛星不斷播發偶數分鐘開始時刻的軌道參數。衛星以7.3公里/秒的速度繞地球運轉,與地面用戶接收設備存在相對運動。接收設備測量多普勒頻移。累計一段時間間隔里的多普勒周期數,稱為多普勒計數。據此算出用戶與衛星(在相鄰2分鐘的偶數分鐘開始時刻所處位置)間的斜距差,這是實測數據。同時,根據用戶假設位置(以經度緯度表示)也算出到衛星的斜距差。兩個斜距差間存在差值說明假設位置不準,於是再算出修正量Δλ、Δφ。當Δλ、Δφ超過規定限差時,則在原假設經度緯度上加入修正量Δλ、Δφ作為新的假設位置。然後,再重複上述過程,直到算出的墹Δλ、Δφ都小於規定限差。此時,得出的位置就是利用“子午儀”導航衛星測定的用戶位置。
信號格式 為了補償電離層折射引起的多普勒計數差值,“子午儀”衛星使用兩個頻率。衛星存儲的全部數據對載頻進行相位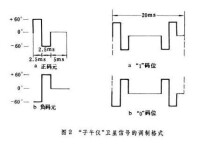 調製,每2分鐘向地面發射一次導航信號,供用戶使用。每批電文由字長39位的156個字加上19個附加位組成。每批電文共有6103個碼位,每碼位佔用發送時間約20毫秒。每碼位又由兩個碼元組成,分成正碼元和負碼元。一個正碼元後接一個負碼元組成“1”碼位,一個負碼元後接正碼元組成“0”碼位(圖2)。
調製,每2分鐘向地面發射一次導航信號,供用戶使用。每批電文由字長39位的156個字加上19個附加位組成。每批電文共有6103個碼位,每碼位佔用發送時間約20毫秒。每碼位又由兩個碼元組成,分成正碼元和負碼元。一個正碼元後接一個負碼元組成“1”碼位,一個負碼元後接正碼元組成“0”碼位(圖2)。
子午儀衛星信號的調製格式
衛星電文 衛星電文每 2分鐘發送一批, 雖然含有156個字和一個19位的終止字,但供民用的只有25個字。它們所表示的都是軌道參數,其中8個字為變化參數,表示衛星軌道攝動變化量,每2分鐘變換一次。其餘17個字為固定參數(開普勒參數),在12小時內重複發送並保持不變。17個字中有11個字用來確定軌道的平均橢圓,其餘並不直接用於定位計算。它們變化很慢,用以預報幾個月內衛星通過的時間(準確度達到幾分鐘以內)。其主要缺點為不能連續定位。