逆向推理
逆向推理
逆向推理又稱目標驅動推理,它的推理方式和正向推理正好相反,它是由結論出發,為驗證該結論的正確性去知識庫中找證據。
目錄
逆向推理的基本推理過程是從表示目標的事實出發,使用一組知識證明事實成立,即提出一批假設(目標),然後逐一驗證這些假設的正確性。推理過程演演算法如下:
給出要求驗證的目標;
檢查該目標是否已在綜合資料庫中,若在,則成功推出,否則,轉下一步;
判斷該目標是否是證據,即是否為應由用戶證實的初始事實。若是,則詢問用戶,否則,轉 下一步;
在知識庫中找出所有可能導出該目標的規則,形成適用的知識集,然後轉下一步;
從知識集中選出一條規則,並將該知識的前件作為新的假設目標,然後轉2)。
逆向推理控制策略的優點是目的性強,不必尋找與假設無關的信息和知識。這種策略對推理過程提供較精確的解釋,告訴用戶要達到目標所使用的規則(知識)。另外,此控制策略在解空間較小的問題求解環境下尤為合適,它利於向用戶提供求解過程。缺點在於初始目標的選擇有盲目性,不能通過用戶提供的游泳信息來操作,用戶要求快速輸入相應的問題領域,若不符合實際,則要多次提出假設,影響系統效率。與正向推理相比,反向推理的目的性很強,通常用於驗證某一特定知識是否成立。
離散數學中的逆向推理:
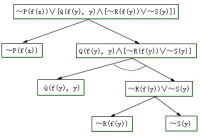
推理演繹