無人潛航器
水下航行器具
無人潛航器,英文名Unmanned underwater vehicle是沒有人駕駛、靠遙控或自動控制在水下 航行的器具,主要指那些代替潛水員或載人小型潛艇進行深海探測、救生、排除水雷等高危險性水下作業的智能化系統。因此,無人潛航器也被稱為“潛水機器人”或“水下機器人”。無人潛航器按應用領域,可分為軍用與民用。在軍用領域上,無人潛航器可作為一種新概念武器中無人作戰平台武器。從這某層意義上說,無人潛航器的作用和無人機作用差不多。
2016年12月15日,中國海軍一艘救生船在南海有關海域發現一具不明裝置,該裝置為美方無人潛航器。
中美雙徠方經友好協商,於12月20日中午在南海有關海域順利完成美無人潛航器的移交工作。
從外形上看,一些無人潛航器與魚雷十分相似,那是因為它們可能直接由拆除了炸藥的魚雷改進而來,或者是需要從潛艇的魚雷發射管中釋放,但更多的無人潛航器則針對特定的功能,具有各自獨特的構造。

無人潛航器

澳大利亞“藍鰭-21”潛航器搜索MH370客機
目前的水下無人潛航器,應用範圍也不斷得到擴充。德國的“海獺”無人潛航器就可以用於近海石油調查、通信線路檢查、軍事應用以及深海探測打撈。澳大利亞研製的“海龜”型無人潛航器,周身安裝了多部掃描聲吶和攝像機,可用於對海底進行實時勘探。日本政府也於2014年投入10億日元經費開發水下無人潛航器,以用於對稀有金屬和天然氣等海洋資源的開發。
雖然無人潛航器的前景頗為看好,但是各國發展無人潛航器普遍受到缺乏高能長效電池、指揮控制技術障礙以及回收過程複雜等問題的困擾。可以預見,隨著相關技術的不斷發展,續航能力更強、多種技能集成於一身的水下無人潛航器,必將得到更加飛速的發展。
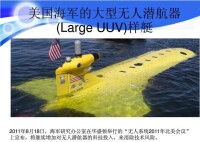
目前,美國海軍正在加緊研發新一代水下無人潛航系統,它不光可以進行電子 偵察和情報傳遞,還可以監聽水面和水下通信,偵察和傳輸能力得到極大提高,而且具有較強的攻擊性。這種無人潛航器已經不僅僅是一個“海底偵察兵”,一種未來水下作戰的“全能戰士”即將出現。

美軍出動“金槍魚”搜尋馬航客機殘骸
目前,無人化戰爭的發展已經呈現出相對清晰的藍圖,即:空中武器無人化、陸地武器無人化、士兵機器人化以及水上武器無人化。無人機是無人化武器裝備中發展最早,也是成效最大的一類,相比無人機,無人潛艇的發展雖然並不晚,但技術進步上略有滯后。它於20世紀50年代開始研製,70~80年代技術較為成熟,但主要應用於排雷,任務比較單一。上世紀末起,世界發達國家海軍開始普遍關注海上無人駕駛艦船,而無人潛艇的進展速度較快。
美國海軍最早的無人潛航器是用制式W48重型魚雷改裝而成的,用大油箱和模塊化的感測器裝置取代了戰雷頭,雖然這一技術粗糙的水下裝置從未投入使用,但卻是美國海軍對無人潛航器的首次嘗試。
美國無人潛航器“海馬”
1995年3月,日本“海溝"號遙控無人潛航器下潛到地球上海水最深的馬里亞納海溝,重新標定了那裡的水深;在2003年的“伊拉克自由”戰爭中,美國人啟用了“海神之子”無人潛航器,對伊拉克烏姆蓋斯爾港的水雷進行探測和清除,為載有人道主義救援物資的英國兩棲艦開闢了航道:2005年8月4日,俄羅斯海軍一艘小型潛艇被困在勘察:加半島東部海域深水,艇員生命危在旦夕,英國海軍緊急派“天蠍”號無人潛航器前往救援,5個小時后終使俄潛艇浮上水面,7名艇員全部獲救。
美國“刀魚”號
從90年代中期開始,美國海軍對無人潛航器的關註明顯升溫,1994年,美海軍首次提出無人潛航器的發展構想:1999年提出第一個無人潛航器的發展計劃,並對無人潛航器的戰術使用要求、技術性能主要任務(探雷、情報搜集、戰場偵察)進行了分析和論證。2000年,美國海軍提出了無人潛航器主體規劃;2002年,美國海軍在《21世紀海上力量構想》中明確指出,無人潛航器是未來海:軍的戰力倍增器、傷亡減少機和承擔風險的“替身”。2003年,美國海軍在《海軍轉型路線圖》中再次強調了無人潛航器的發展重要性,並首次將無人潛航器的發展與2世紀海上力量計劃結合在一起。2004年11月,美國海軍根據新的水面與水下聯合作戰的思想要求,對2¨0年版的無人潛航器主體規劃進行了修訂,強調提高無人潛航器與潛艇和水面艦艇的信息互通能力:2005年1月,美國海軍公布了全新的迄今最完整的《無人潛航器總體發展規劃,明確提出了未來無人潛航器的開發級別並,對無人潛航器在未來海軍四大支柱(力量網、海上盾牌海上基地、海上打擊)中的使命任務做出了具體規定。
按照《無人潛航器總體發展規劃》,美海軍要求未來的無人潛航器應儘可能實現標準化,模塊化和智能化,為此,應進一步開發自主化技術能源技術、推進技術、感測器和術信號處理技通信和導航技術,攻防作戰技術和人工干涉技術等,總體規劃具體提出,美國海軍應開發和部署以下四種級別的無人潛航器:
①攜帶型無人潛航器,這種潛航器可由人工攜帶,一般由橡皮艇施放,直徑約76230毫米,全重不超過45千克,水下自持力10小時(高負荷狀態)20小時(低負荷狀態),主要功能是用於特定目的的情報監視和偵察,一次性的通信導航與中繼,淺水水雷的探測`識別和滅殺,爆炸物的處理等。
2輕型無人潛航器,這種潛航器外形似魚雷,直徑323毫米,重量226千克左右,有效載荷比攜帶型多出6一10倍,水下自持力20小時(高負荷狀態)―40小時c低負荷狀態)可由現役輕型魚雷(如MK46或MK50魚雷)發射管發射和回收,主要用於港口偵察與監視,移動式通信、導航與中繼,雷區探測和特定目的的海底調查等,
③重型無人潛航器,這種潛航器亦如魚雷,直徑533毫米,重量1360千克左右,有效載荷體積46立方英尺,水下自持力30小時(高負荷狀態)一80小時低負荷狀態)可用現役重型魚雷發射管(如MK48魚雷)發射和回收,將來也可由DD(X)等大型水面艦艇投射,主要用於戰術偵察和監視`反水雷作戰充當誘餌日標,大範圍秘密偵測、海洋調查等任務。
④巨型無人潛航器,這種潛航器體積較大,直徑在90毫米以上,排水量10噸左右,活動半徑1904米,水下自持力150小時(高負荷狀態)400小時(低負荷狀態)可由攻擊型核潛艇和巡航導彈核潛艇的垂直發射隔艙或外置式發射裝置施放,也可由水面支援艦艇攜載投放,主要用於持續警戒、偵察和監視,反潛作戰、反水雷作戰,有效載荷投送,特種作戰、爆炸物處置,信息戰,對時敏目標的突然打擊和遠程打擊等。
美國海軍的《無人潛航器總體發展規劃》還特彆強調加快無人潛航器的合作開發,盡量採用現有的商業准軍用技術,與其它無人系統(如水面無人艇)協調發展,確保與其它系統間的互操作性,增加試驗和評估次數,降低研製費用和造價,儘快裝備部隊等等自90年代中期以來,無人潛航器這一新概念的水下作戰平台日益受到海軍大國的重視,美歐一此國家競相在這一領域展開研究,提出了各種各樣的開發方案,到目前為止,多種無人潛航器已開始投入試驗,有的甚至已經進入實用階段。
自2009年起,美國海軍已部署並測試了一系列自主式無人潛航器(AUV),這些潛航器雜訊極低、體積小,可自主工作長達1年。早期的潛航器全長2米,重59千克,可完全自主化執行任務,收集水下環境的重要信息。這種AUV水下航速較慢(每天30-70千米),可收集水下鹽度和溫度數據,每隔一小時左右可臨時浮上水面,並通過衛星數據鏈向後方傳輸數據。由於聲波在水中的傳輸將受到水溫和鹽度的影響,因此這些數據可改善友軍聲納的作戰效能,使其更容易探測並跟蹤敵方潛艇,更精確地水下溫度和鹽度數據有助於提高水下感測器的精度。目前海軍AUV的最大下潛深度為200米,但新型AUV的下潛深度科大1000米。
這些AUV採用獨特的動力方式。艇上裝有翼,並配有小型水泵以排空或充滿壓載艙。這種方法可改變其浮力,使其在水下滑行,同時也可使AUV向前移動。通過GPS和導航、通信計算機,可使AUV對特殊海域進行監視。由於艇上的水泵耗電量很低,因此這些AUV在一次充電后執行任務的時間可長達一年。電力用盡前,海軍將引導AUV與水面艦艇回合,並由水面艦回收。小型的AUV維護團隊可隨艦直接參與AUV的回收工作。同時,海軍還可指揮AUV駛向岸邊以降低回收難度。這些AUV可由艦艇或岸上部署。2009年,作為一項民用科研項目,一艘該型號的AUV成功自主穿越大西洋。
目前海軍共擁有該型AUV 75艘,並計劃到2015年總數至少達到150艘,以替代目前大量的海洋監測船。這些監測船通過艦載設備和全球上千個科研浮標組成的網路探測水下的溫度和鹽度。與監測船隻不同,AUV可長期部署在敵方潛艇出沒的海域。如果該計劃得以實現,未來的AUV將更大,裝備更多感測器,並擁有更長的任務執行時間。
最近幾年,潛航器技術進步較快,這包括自動控制軟體和水下通信技術。同載人平台相比,水下無人潛航器的風險和成本較低,尤其是,無人平台的成本同現有的載人平台相比,成本低得多。
把水下無人潛航器使用於反潛戰和掃雷行動,是一種新型的進攻和防禦方式。
最近,水下無人潛航器技術的進步,以及它們對海軍作戰行動的影響,意味著這些對抗技術將要實現,這比我們開始預測的還要早。美國對於水下潛航器的研發已經進入了一個更深入的階段,在最近兩三年內性能更優良、更新的水下潛航器將投入使用。
2013年美海軍已將第一批MK 18 Mod 2“王魚”型無人潛航器部署在第五艦隊。“王魚”型無人潛航器是由美海軍研發的,用於水雷探測的自主式無人潛水器,它提高了續航能力和區域覆蓋率,並將取代“劍魚(Swordfish)”系統。可以預見,“水下潛航器”絕對能夠成為未來海戰的殺手鐧。它是一種新型的作戰平台,與潛艇相比,它有許多優勢:
一、它是一種無人作戰平台,因此可以大大降低戰爭的傷亡。

美統
二、由於它的小型化,如果再加上其他的隱身高科技,它的隱身性能將大大高於潛艇。
三、徠多功能,多用途。
無人水下潛航器可以用於不同的軍事目的。即可以用於偵察也可以用於攻擊。美軍將無人潛航器作為海軍實施“網路中心戰”、加強水下ISR(情報、偵察、監視)系統建設重要的環節。
同時,它還可以作為一個武器平台,攜帶魚類或導彈,以一種靜謐的方式,進攻地方戰略目標,達到攻其不備、事半功倍的效果。除美國以外,世界各國也都在加緊無人潛航器這一水下尖端武器的研究發展。英國於1998年開始“莫林”無人潛航器的研究工作,其目前最先進的無人潛航器“護身符”不但可以進行水下偵察,還可以安裝滅雷裝置,能夠執行多種不同水下任務。
2001年1月,日本研製的一種水下無人潛航器在日本某軍港下水。除此以外,澳大利亞研製的“塞拉菲娜”反水雷無人潛航器、德國的“長尾鮫”攻擊型潛航器、挪威的“水下排雷手”和法國的“REDERMOR”水下無人掃雷潛航器,技術都相當成熟。
但對無人潛航器而言,最重要的還是如何面對一個嚴酷的“生存環境”。海水的密度是空氣的8印倍,水深每增加10米,水的壓力就會加大相當於1個大氣壓。而在海平面30~50米以下,陽光就無法穿透,黑暗籠罩著一切。海水中還有難以琢磨的暗流、暗涌,海底地貌更是千溝萬壑、鬼斧神工。僅僅“生存”是遠遠不夠的,無人潛航器還要在如此複雜、惡劣的環境中進行下潛、上浮、航行、定位,並完成賦予它的各種使命。解決這一問題最直接的辦法就是讓無人潛航器帶上攝像機將海底情況拍攝下來,通過連接著母船的電纜將畫面傳到人的眼前,再由人通過操縱桿在遠端控制潛航器的一舉—動。
無人水下潛航器目前分為兩大類:遙控型(ROV)和自主型(AUV)。ROV是拴在宿主艦船上,由操作人員持續控制;AUV可經過編程航行至一個或多個航點,在預定時間段內獨立作戰。AUV自帶電能,靈活自如,因此應用廣泛,正在成為未來水下偵察的新星。這兩種類型的UUV通常配備有效載荷,包括聲波、攝像機、環境感測器、機械臂以及一種水雷破壞裝置。
ROV,系統組成包括:動力推進器、遙控電子通訊裝置、黑白或彩色攝像頭、攝像俯仰雲台、用戶外圍感測器介面、實時在線顯示單元、導航定位裝置、自動舵手導航單元、輔助照明燈和凱夫拉零浮力拖纜等單元部件。功能多種多樣,不同類型的ROV用於執行不同的任務,被廣泛應用于軍隊、海岸警衛、海事、海關、核電、水電、海洋石油、漁業、海上救助、管線探測和海洋科學研究等各個領域。
ROV分為觀察級和作業級。
觀察級ROV的核心部件是水下推進器和水下攝像系統,有時輔以導航、深度感測器等常規感測器。本體尺寸和重量較小,負荷較低。成本較低。
作業級ROV用於水下打撈、水下施工等應用,尺寸較大,帶有水下機械手、液壓切割器等作業工具。造價高。
“長尾鮫”(SeaFox)ROV
德國阿特拉斯電子公司生產的“長尾鮫”ROV為“半自主”潛航器。雖然“長尾鮫”通過光纖電纜由搭載艦船控制,但其可以使用聲納自動追蹤水雷或類似水雷目標。“長尾鮫”使用艦載監控攝像頭識別目標,並可使用一次射擊型水雷壓制系統摧毀目標。
“海眼”(Seaeye)ROV
英國泰利斯公司在2013年無人機系統國際協會(AUVSI)展會上公布了用於水雷對抗作戰的創新型軍事/商業技術驗證型UUV,即薩博“海眼”ROV。該ROV裝備“九頭蛇”多重射擊型水雷壓制系統。英國皇家海軍10月份對其進行了驗證測試。
“雙鷹”(Double Eagle)ROV
集裝箱化的解決方案在海軍中越來越普遍。2012年,丹麥皇家海軍的薩博“雙鷹”ROV配備水雷摧毀系統,其模塊化、集裝箱化的水雷對抗能力已具備完全作戰能力。
SeaBotix vLBV950 ROV
加拿大皇家海軍近日裝備8艘SeaBotix vLBV950 ROV,用於船底監視並執行深水任務,如尋找失蹤飛機及搜索“黑匣子”。這些ROV也可用於搜索被海盜拋棄或走私的物品及水雷對抗裝備。
習慣稱為自主式水下潛器(Autonomous Underwater Vehicle,簡稱AUV)。
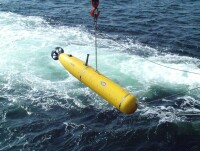
“刀魚”AUV項目
通用動力公司2013年8月份宣布已成功完成美海軍“刀魚”無人水下潛航器項目的綜合風險降低階段。“刀魚”AUV基於美國藍鰭機器人公司的“藍鰭”-21開發,計劃於2017年作為近海戰鬥艦水雷對抗任務包的一部分。“刀魚”由GPS制導,具有充分的自主能力,長約6米,重約1360千克,可以6節速度航行,可持續作戰時間約16小時。“刀魚”將攜帶新式低頻寬頻聲納,可在高度紛雜的海底環境探測和識別水雷。
“近海戰場感知”(LBS)AUV
美國水螅公司(現屬於挪威康斯貝格公司)今年2月宣布,其為美國海軍空間和海上作戰系統司令部(SPAWAR)開發的“近海戰場感測”AUV已經進入全速生產。LBS AUV是“雷穆斯600”AUV的改型。
“雷穆斯600”(Remus 600)AUV
“雷穆斯600”AUV由水螅公司開發,主要用于海洋氣象數據收集。2012年6月,日本防衛省購買了一艘“雷穆斯600”系統用於水雷對抗任務,及研究和繪製海床污染物的分布圖。德國及挪威均採購“雷穆斯600”AUV用於水雷對抗任務。
美國水雷反制無人潛航器SMCM UUV
水下袋鼠:潛射型無人潛航器 這是一種可利用潛水艇魚雷發射管發射的無人潛艇,人稱水下“袋鼠”。它不僅可以用於清除魚雷,而且還可以用於水中和水上情報收集。例如,美國的近期魚雷偵察系統(NMRS),是美國海軍第一代搜索魚雷用的無人潛艇,1999年4月開始投入使用。這是一種從潛水艇的魚雷發射管發射的無人潛艇,呈魚雷狀,從母艦上用光纜進行控制,由於尚存在導航精度和光纜操縱等性能上的問題,美國已開始開發遠期魚雷偵察系統(LMRS),它能夠以比近期魚雷偵察系統更快的搜索頻率來長時間地、可靠地工作,而且不使用電纜或光纜。該艇完成任務后,還可以通過使用母艦(潛水艇)右舷魚雷發射管內的機器人手臂進行回收,原計劃在2004年左右運用到海狼級和弗吉尼亞級攻擊核潛艇上,目前看來發展速度可能不如原先設計的那麼快。
自主搜索:半潛型無人潛艇 目前,一些國家還在開發一種半浮半潛型無人潛航器,即雖然航行體本身在水下,但是發動機的進氣和排氣口以及通信天線等仍露在水面上。這種無人潛艇不但自身裝有感測器,而且還攜帶了有感測器的小型潛水器,用來搜索海底附近的魚雷等。這種半潛型無人潛艇通過通信天線從母艦上進行無線遙控操作,可以利用全球定位系統,按照事前設定的路線獨立航行。例如,法國使用的“劍魚”,全長8.3米,能以12節的航速連續航行400海里。它可與全球定位系統聯動,將收集到的聲納影像數據通過無線通信傳送給母艦。

美軍酷似魚的“幽靈泳者”號
中國研發武器裝備一貫低調,中國很多新型武器裝備都由外媒所曝光。2010年5月17日出版的美國《防務新聞》周刊刊發該刊駐台灣辦公室主任溫德爾·明尼克的文章,稱中國正在推進無人潛航器(UUV)項目。文章稱,除了從歐洲進口一些商用無人潛航器之外,中國還在進行自主研發,中國的無人潛航器“海人一號”已經在上世紀80年代研發出來;“探索者”無人潛航器則在1993年研發,而基於俄羅斯技術研製的CR-01無人潛航器也已問世,近期中國還研發了“治水-3”( Zhishui 3)和SPC-3等無人潛航器。文章引用美國專家的話猜測說,中國海軍將把這些無人潛航器用於打造水下信息網路的節點,可向衛星發射信號,甚至作為武器平台使用,但研發中面臨著動力問題。
文章首先說,中國海軍正在致力於無人潛航器項目,用於掃雷、海洋探測研究、收集情報信息,還有可能用於鋪設或者切斷海底通信電纜。
美國海軍戰爭學院中國海事研究所主任金萊爾(Lyle Goldstein)說:“除了潛在的切斷或者甚至竊聽通訊電纜之外,我認為另外一項主要問題在於中國的無人潛航器或用於干擾他國的海底設施(感測器),或者同時還鋪設中國自己的類似海底設施”。金萊爾還說,對於中國海軍的無人潛航器項目先進程度如何,西方觀察家尚不能完全確定。
文章還說,中國軍方或許從中國船舶工業貿易公司(CSTC)的一系列尖端水雷和魚雷的研發工作中學到很多,該公司生產EM-56型自行推進水雷、EM-22多功能沉底水雷和一種可由潛艇部署的配有300千克彈頭的EM-57遙控水雷,他們或許還從水下機器人(ROV)和其他商業艦隻方面獲益。
AMI無人系統公司總經理安德魯·漢德森(Andrew Henderson)說:“找到有關中國研發進展的信息是困難的,但是根據我們跟蹤的情況,售予中國的無人潛航器技術處於商業最終用戶層面,向中國出售水下機器人主要用於近海石油和天然氣勘探。”
金萊爾提到,歐洲的一些無人機潛航器技術售予中國,這僅僅是初步的表面現象。中國還在研發水下自航行器(AUV)。位於美國華盛頓州的海事分析公司AMI國際副總裁鮑勃-紐金特(Bob Nugent)表示,根據公開的資料,中國在水下機器人的研發稍遜於水下自航行器。金萊爾則在早些時候說過,中國的無人潛航器“海人一號”已經在上世紀80年代中期由瀋陽一家單位研發出來;“探索者”無人潛航器則在1993年研發,而基於俄羅斯MT-88技術研製的CR-01無人潛航器也已問世。文章還提到,近期中國還研發了“治水-3”( Zhishui 3)和SPC-3等無人潛航器。
文章繼而猜測說,中國海軍也在大規模進行無人潛航器的研究,並將其作為較大型信息網路的節點,金萊爾認為,部署這種潛航器的成本低,很具可行性,作為水下通訊平台,它可以作為水下網路的一部分,可以作為通訊中繼站,可以與衛星系統相連接,向衛星發射信號,還可以作為感測器平台,甚至當做武器發射平台。金萊爾還提到了中國發展無人潛航器面臨的一些困難,電池動力依然是主要瓶頸,他說這將迫使中國的設計人員儘力避免在一個潛航器平台上裝設太多的功能。

我國CR-01
1994年“探索者”號研製成功,它工作深度達到1000米,甩掉了與母船間聯繫的電纜,實現了從有纜向無纜的飛躍。
“潛龍一號”是中國國際海域資源調查與開發“十二五”規劃重點項目之一,是中國自主研發、研製的服務於深海資源勘察的實用化深海裝備。該項目於2011年11月正式啟動,2013年3月完成湖上試驗及湖試驗收。

中國“探索者號”無人潛航器
2014年2月20日至4月22日,我國自主研製的首台4500米級深海遙控無人潛水器作業系統——“海馬號”ROV搭乘“海洋六號”綜合科學考查船分三個航段在南海進行海上試驗,並於4月18日通過了由863海洋技術領域辦公室委派的海試現場專家組進行的海上驗收。
為強化技術研發與應用需求的緊密結合,國土資源部作為該項目的主持部門,其下屬廣州海洋地質調查局作為業主單位牽頭,聯合上海交通大學、浙江大學、青島海洋化工研究院、同濟大學和哈爾濱工程大學等國內優勢單位,共同協作完成研製與海試。
個性能優良的無人潛航器,須集先進的導航操控系統,能源與推進系統、通信與環境感知技術於一體,未來無人,潛航器的發展趨勢主要集中在以下幾個方面::
①突破航行體設計技術障礙,
為降低成本、減少能源消耗,未來無人潛航器的航行體技:術將會向體積孝兼容性高及模塊化方向發展,突破現有航,行體設計中的障礙。一方面由於國際間的技術合作愈加密切,高兼容性和模塊化技術的應用將大幅度降低無人潛航,器的製造成本;另一方面,由於微機電系統技術的應用和裝置的縮小,使得設計出體積更小的無人潛航器成為可能:進而減少能源消耗
②開發新能源,提高續航力:
為滿足軍事需求,要求未來無人潛航器將具有更長時間的執行任務能,力,新的能源必須為無人潛航器提供更長的續航力,如數月、甚至數:年以上。目前核電池及太陽能電池都已經能夠滿足這一需求,相信在:目前先進的電池技術基礎上,未來無人潛航器的能源系統將會更加持久和安全。
③進一步提高導航定位能力,
精確的導航定位能力是無人潛航器成功執行任務的基本要素。由於無人潛航器在水下作業的時間越來越長,慣性導航的累計誤差不能令人,滿意,而又不能老是叫無人潛航器浮出水面,使用GPS衛星定位來修,正慣性導航誤差,另一方面也可能會因上下往返而減少其執行任務的時間。因此,利用聲波定位及水下環境地形導航技術(如地形輪廓跟隨法、海底映像地圖匹配法以及其他的地球物理技術)將成為發展的重點
(4)改進控制系統,提高自適應能
無人潛航器是中國海軍智能化平台,集戰場環境偵察、敵情監視等多種功能於一身,是未來無人作戰的典型裝備。(李玉評)

基本信息
- 中文名
- 無人潛航器
- 外文名
- Unmanned underwater vehicle
- 別名
- 無人潛水器、無人深潛器
- 作用
- 海洋偵察、反潛戰、水雷戰等
- 適用範圍
- 陸地、水下
- 工作時間
- 10-100小時