創建詞條
登錄/註冊
預測控制演演算法
預測控制演演算法
預測控制演演算法是一類基於模型預測的計算機控制演演算法的總稱。通常包括動態矩陣控制,模型演演算法控制,內模控制,廣義預測控制等。
目錄
1
基本概況
基本概況
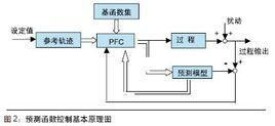
預測控制演演算法是利用
預測模型
來預估過程未來的輸出狀況與設定值之}a}的偏差,以此為基礎,採用“滾動式”的
最優化
策略來計算當前的控制輸人,並引人輸出的實時測量值來進行在線校正。它具有對
數學模型
要求不高,能處理具有
時滯
的對象,跟蹤性能良好等優良性能。
基本信息
目錄
目錄