腦機介面
在人或動物腦與外部設備間建立的連接通路
腦機介面(Brain Computer Interface,BCI ),指在人或動物大腦與外部設備之間創建的直接連接,實現腦與設備的信息交換。這一概念其實早已有之,但直到上世紀九十年代以後,才開始有階段性成果出現。
2008年,匹茲堡大學神經生物學家宣稱利用腦機介面,猴子能用操縱機械臂給自己餵食。2020年8月29日,埃隆·馬斯克自己旗下的腦機介面公司找來“三隻小豬”向全世界展示了可實際運作的腦機介面晶元和自動植入手術設備

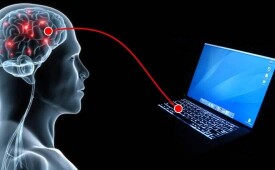
意念控制模式示意圖
全球範圍對此領域的基礎研究已經有很多年了。各國尖端研究領域都非常重視它的研究價值。在早在2001年的自然雜誌上發表的論文就對用思想直接對機器進行控制有了重要的闡述。在MIT的“21世紀能改變世界的10大技術”排行榜中,腦機介面技術排名第一位。
20世紀90年代中期以來,從實驗中獲得的此類知識呈顯著增長。在多年來動物實驗的實踐基礎上,應用於人體的早期植入設備被設計及製造出來,用於恢復損傷的聽覺、視覺和肢體運動能力。研究的主線是大腦不同尋常的皮層可塑性,它與腦機介面相適應,可以象自然肢體那樣控制植入的假肢。在當前所取得的技術與知識的進展之下,腦機介面研究的先驅者們可令人信服地嘗試製造出增強人體功能的腦機介面,而不僅僅止於恢復人體的功能。這種技術在以前還只存在於科幻小說之中。
腦機介面技術的研究和關鍵技術問題的解決不僅需要其他學科領域的發展,而且能夠反過來促進諸如認知神經科學、心理學、模式識別、信號處理和電子技術的交叉與發展。我們有理由相信腦機介面技術在不久的將來會有著深刻的影響並得到廣泛的應用。
21世紀初,不管是腦電(EEG),功能磁共振成像(fMRI),還是腦磁(MEG),及近紅外譜(NIRS)。以及對人腦有一定侵入性的腦皮層電圖(ECOG),現在都還不能從時間和空間兩個維度上準確刻畫人腦的全部活動狀態。但可以肯定的是,腦機介面中所用到的這些記錄人腦活動的方式雖然精度不高,但已經證明人的主觀意識是有物質基礎的。
腦機介面中,EEG等腦信號是載體,它從人腦傳遞到計算機,計算機從中識別出人的主觀意圖。這個過程中通過EEG載體,把人的主觀意圖從人腦直接傳遞給計算機,計算機將這個識別出來的主觀意圖轉化為控制信號。
21世紀初的腦機介面技術中有利用人腦來控制外部機設備或電腦滑鼠的運動,也有輸入字元的“虛擬打字機”,還有自動圖片分類等應用。國內外也有研究將控制信號從外界傳送給小老鼠,鳥等動物,這是這類應用中控制信號的流向不同。但這些受控體都沒有接受情感類的信號,也不存在表情。而電影中的阿凡達,是個有血有肉的活體,有正常人的情感和喜怒哀樂。
現階段(21世紀初)還存在許多困難:雖然使用先進的信號採集設備已能夠檢測非常微弱的腦電信號,但是腦電信號中不可避免的摻雜了各種雜訊,使得數據的信噪比較低。近年來腦電數據處理的相關研究取得了令人矚目的成績,同時,信息科學與技術的不斷進步也使得實時快速處理大量數據成為可能。藉助於這些成果,腦機介面的技術得到了快速的發展,研究群體和組織也迅速壯大。
神經修復是神經科學中和神經的修復相關的領域,即使用人工裝置(假體)替換掉原有功能已削弱的部分神經或感覺器官。神經假體最廣泛的應用是人工耳蝸,截止到2006年世界上已有大約十萬人植入。也有一些神經假體是用於恢復視力的,如人工視網膜,迄今在這方面的工作僅僅局限於將人工裝置直接植入腦部。
腦機介面和神經修復的區別主要從字面上就可見其端倪:“神經修復”通常指臨床上使用的裝置,而許多現有的腦機介面仍然是實驗性質的。實踐上講神經假體可以和神經系統的任意部分相連接,如外周神經系統;而“腦機介面”通常指一類範圍更窄的直接與腦相連接的系統。
由於目標和實現手段的相似性,“神經修復”和“腦機介面”兩術語經常可以通用。神經修復和腦機介面嘗試達到一個共同的目標,如恢復視覺、聽覺、運動能力,甚至是認知的能力。兩者都使用類似的實驗方法和外科手術技術。

原理
一些實驗室已實現從猴和大鼠的大腦皮層上記錄信號以便操作腦機介面來實現運動控制。實驗讓猴只是通過回想給定的任務(而沒有任何動作發生)來操縱屏幕上的計算機游標並且控制機械臂完成簡單的任務。另外在貓上進行的研究對視覺信號進行了解碼。
在面向運動功能的腦機介面方面,發展演演算法重建運動皮層神經元對運動的控制,該研究可以回溯到20世紀70年代。Schmidt, Fetz和Baker領導的小組在20世紀70年代證實了猴可以在閉環的操作性條件作用(closed-loop operant conditioning)后快速學會自由地控制初級運動皮層中單個神經元的放電頻率。20世紀80年代,約翰斯·霍普金斯大學的Apostolos Georgopuolos找到了獼猴的上肢運動的方向和運動皮層中單個神經元放電模式的關係。他同時也發現,一組分散的神經元也能夠編碼肢體運動。
上世紀九十年代中期以來,面向運動的腦機介面經歷了迅速的發展。若干研究小組已經能夠使用神經集群記錄技術實時捕捉運動皮層中的複雜神經信號,並用來控制外部設備。其中主要包括了Richard Andersen、John Donoghue、Phillip Kennedy、Miguel Nicolelis和Andrew Schwartz等人的研究小組。
迄今人類已經能夠修復或者正在嘗試修復的感覺功能包括聽覺、視覺和前庭感覺。
人工耳蝸是迄今位置最成功、臨床應用最普及的腦機介面。
視覺修復技術尚在研發之中。這方面的研究和應用落後於聽覺同能的主要原因是視覺傳遞信息量的巨大和外周感覺器官(視網膜)和中樞視覺系統在功能上的相對複雜性。具體參見視覺假體。
美國約翰·霍普金斯大學的Della Santina及其同事開發出一種可以修復三維前庭感覺的前庭植入物。
Phillip Kennedy及其同事用錐形營養性(neurotrophic-cone)電極植入術在猴上建造了第一個皮層內腦機介面。
1999年,哈佛大學的Garrett Stanley試圖解碼貓的丘腦外側膝狀體內的神經元放電信息來重建視覺圖像。他們記錄了177個神經元的脈衝列,使用濾波的方法重建了向貓播放的八段視頻,從重建的結果中可以看到可辨認的物體和場景。
杜克大學的Miguel Nicolelis是支持用覆蓋廣大皮層區域的電極來提取神經信號、驅動腦機介面的代表。他認為,這種方法的優點是能夠降低單個電極或少量電極採集到的神經信號的不穩定性和隨機性。Nicolelis在1990年代完成在大鼠的初步研究后,在夜猴內實現了能夠提取皮層運動神經元的信號來控制機器人手臂的實驗。到2000年為止,Nicolelis的研究組成功實現了一個能夠在夜猴操縱一個遊戲桿來獲取食物時重現其手臂運動的腦機介面。這個腦機介面可以實時工作。它也可以通過網際網路遠程操控機械手臂。不過由於猴子本身不接受來自機械手臂的感覺反饋,這類腦機介面是開環的。Nicolelis小組後來的工作使用了恆河猴。
其它設計腦機介面演演算法和系統來解碼神經元信號的實驗室包括布朗大學的John Donoghue、匹茲堡大學的Andrew Schwartz、加州理工的Richard Anderson。這些研究者的腦機接在某一時刻使用的神經元數為15-30,比Nicolelis的50-200個顯著要少。Donoghue小組的主要工作是實現恆河猴對計算機屏幕上的游標的運動控制來追蹤視覺目標。其中猴子不需要運動肢體。 Schwartz小組的主要工作是虛擬現實的三維空間中的視覺目標追蹤,以及腦際介面對機械臂的控制。這個小組宣稱,他們的猴子可以通過腦機介面控制的機械臂來喂自己吃西葫蘆。Anderson的小組正在研究從后頂葉的神經元提取前運動信號的腦機介面。此類信號包括實驗動物在期待獎勵時所產生信號。
除了以上所提及的這些用於計算肢體的運動參數的腦機介面以外,還有用於計算肌肉的電信號(肌電圖)的腦機介面。此類腦機介面的一個應用前景是通過刺激癱瘓病人的肌肉來重建其自主運動的功能。
2006年,布朗大學研究團隊完成首個大腦運動皮層腦機介面設備植入手術,能夠用來控制滑鼠。
2008年,匹茲堡大學神經生物學家宣稱利用腦機介面,猴子能用操縱機械臂給自己餵食——這標誌著該技術發展已經容許人們將動物腦與外部設備直接相連。
2012年,腦機介面設備已能夠勝任更複雜和廣泛的操作,得以讓癱瘓病人對機械臂進行操控,自己喝水、吃飯、打字與人交流。
2014年巴西世界盃開幕式,高位截癱青年Juliano Pinto在腦機介面與人工外骨骼技術的幫助下開出一球。
2016年,Nathan Copeland用意念控制機械手臂和美國總統奧巴馬握手。
2019 年 1 月,Chmielewski 作為約翰斯·霍普金斯大學一項腦機介面研究的參與者,通過一次長達 10 小時的手術,將六個微電極陣列(MEA)植入大腦兩側。隨後,研究者一直試圖通過不斷的改善和訓練,讓他獲得同時控制兩個假肢的能力。
2020年8月29日,埃隆·馬斯克自己旗下的腦機介面公司Neuralink舉行發布會,找來“三隻小豬”向全世界展示了可實際運作的腦機介面晶元和自動植入手術設備。
侵入式腦機介面主要用於重建特殊感覺(例如視覺)以及癱瘓病人的運動功能。此類腦機介面通常直接植入到大腦的灰質,因而所獲取的神經信號的質量比較高。但其缺點是容易引發免疫反應和愈傷組織(疤),進而導致信號質量的衰退甚至消失。
視覺腦機介面方面的一位先驅是William Dobelle。他的皮層視覺腦機介面主要用於後天失明的病人。1978年,Dobelle在一位男性盲人Jerry的視覺皮層植入了68個電極的陣列,並成功製造了光幻視(Phosphene)。該腦機介面系統包括一個採集視頻的攝像機,信號處理裝置和受驅動的皮層刺激電極。植入后,病人可以在有限的視野內看到灰度調製的低解析度、低刷新率點陣圖像。該視覺假體系統是攜帶型的,且病人可以在不受醫師和技師幫助的條件下獨立使用。
2002年,Jens Naumann成為了接受Dobelle的第二代皮層視覺假體植入的16位病人中的第一位。第二代皮層視覺假體的特點是能將光幻視更好地映射到視野,創建更穩定均一的視覺。其光幻視點陣覆蓋的視野更大。接受植入后不久,Jens就可以自己在研究中心附近慢速駕車漫遊。
針對“運動神經假體”的腦際介面方面,Emory大學的Philip Kennedy和Roy Bakay最先在人植入了可獲取足夠高質量的神經信號來模擬運動的侵入性腦際介面。他們的病人Johnny Ray患有腦幹中風導致的鎖閉綜合症。Ray在1998年接受了植入,並且存活了足夠長的時間來學會用該腦機介面來控制電腦游標。
2005年,Cyberkinetics公司獲得美國FDA批准,在九位病人進行了第一期的運動皮層腦機介面臨床試驗。四肢癱瘓的Matt Nagle成為了第一位用侵入式腦機介面來控制機械臂的病人,他能夠通過運動意圖來完成機械臂控制、電腦游標控制等任務。其植入物位於前中回的運動皮層對應手臂和手部的區域。該植入稱為BrainGate,是包含96個電極的陣列。
部分侵入式腦機介面一般植入到顱腔內,但是位於灰質外。其空間解析度不如侵入式腦機介面,但是優於非侵入式。其另一優點是引發免疫反應和愈傷組織的幾率較小。
皮質腦電圖(ECoG:ElectroCorticoGraphy)的技術基礎和腦電圖的相似,但是其電極直接植入到大腦皮層上,硬腦膜下的區域。華盛頓大學(聖路易斯)的Eric Leuthardt和Daniel Moran是最早在人體試驗皮層腦電圖的研究者。根據一則報道,他們的基於皮層腦電圖的腦際介面能夠讓一位少年男性病人玩電子遊戲。同時該研究也發現,用基於皮層腦電圖的腦機介面來實現多於一維的運動控制是比較困難的。
基於“光反應成像”的腦機介面尚處在理論階段。其概念是在顱腔內植入可測量單神經元興奮狀態的微型感測器,以及受其驅動的微型激光源。可用該激光源的波長或時間模式的變化來編碼神經元的狀態,並將信號發送到顱腔外。該概念的優點是可在感染、免疫反應和愈傷反應的幾率較小的條件下長時間監視單個神經元的興奮狀態。
和侵入式腦機介面一樣,研究者也使用非侵入式的神經成像術作為腦機之間的介面在人身上進行了實驗。用這種方法記錄到的信號被用來加強肌肉植入物的功能並使參加實驗的志願者恢復部分運動能力。雖然這種非侵入式的裝置方便佩戴於人體,但是由於顱骨對信號的衰減作用和對神經元發出的電磁波的分散和模糊效應,記錄到信號的解析度並不高。這種信號波仍可被檢測到,但很難確定發出信號的腦區或者相關的單個神經元的放電。
作為有潛力的非侵入式腦機介面已得到深入研究,這主要是因為該技術良好的時間解析度、易用性、便攜性和相對低廉的價格。但該技術的一個問題是它對雜訊的敏感,另一個使用EEG作為腦機介面的現實障礙是使用者在工作之前要進行大量的訓練。這方面研究的一個典型例子是德國圖賓根大學的Niels Birbaurmer於1990年代進行的項目。該項目利用癱瘓病人的腦電圖信號使其能夠控制電腦游標。經過訓練,十位癱瘓病人能夠成功地用腦電圖控制游標。但是游標控制的效率較低,在屏幕上寫100個字元需要1個小時,且訓練過程常耗時幾個月。在Birbaumer的後續研究中,多個腦電圖成分可被同時測量,包括μ波和β波。病人可以自主選擇對其最易用的成分進行對外部的控制。
與上述這種需要訓練的EEG腦機介面不同,一種基於腦電P300信號的腦機介面不需要訓練,因為P300信號是人看到熟識的物體是非自主地產生的。美國羅切斯特大學的Jessica Bayliss的2000年的一項研究顯示,受試者可以通過P300信號來控制虛擬現實場景中的一些物體,例如開關燈或者操縱虛擬轎車等。
1999年,美國凱斯西留地大學由Hunter Peckham領導的研究組用64導腦電圖恢復了四肢癱瘓病人Jim Jatich的一定的手部運動功能。該技術分析腦電信號中的β波,來分類病人所想的向上和向下兩個概念,進而控制一個外部開關。除此以外,該技術還可以使病人控制電腦游標以及驅動其手部的神經控制器,來一定程度上回復運動功能。
應用人工神經網路,計算機可以分擔病人的學習負擔。Fraunhofer學會2004年用這一技術顯著降低了腦機介面訓練學習所需的時間。
Eduardo Miranda的一系列試驗旨在提取和音樂相關的腦電信號,使得殘疾病人可以通過思考音樂來和外部交流,這種概念稱為“腦聲機”(encephalophone)。
腦磁圖(MEG)以及功能核磁共振成像(fMRI)都已成功實現非侵入式腦機介面。例如在一項研究中,病人利用生物反饋技術可以用改變fMRI所檢測到的腦部血流信號來控制乒乓球運動。 也有人用fMIR信號來准實時地控制機械臂,這一控制的延遲大位7秒左右。
John Donoghue及其同事創立了Cybernetics公司,宗旨是推動實用的人類腦機介面技術的發展。該公司目以Cybernetics神經技術公司為名在美國股市上市。BrainGate是該公司生產的電極陣列,該產品基於美國猶他大學的Richard Normann研發的“猶他”電極陣列。
Philip Kennedy創立了Neural Signals公司。該公司生產的腦機介面設備使用玻璃錐內含的蛋白質包裹的微電極陣列,旨在促進電極和神經元之間的耦合。該公司除了生產侵入式腦際介面產品,還銷售一種可回復言語功能的植入設備。
2004年為止,William Dobelle創建的公司已經在16位失明病人內植入了初級視皮層視覺假體。該公司仍在繼續研發視覺植入物,但這類產品至今沒有獲得FDA的批准,因而不能在美國境內使用於人類。
細胞培養物的腦機介面是動物(或人)體外的培養皿中的神經組織和人造設備之間的通訊機制。 這方面研究的焦點是建造具有問題解決能力的神經元網路,進而促成生物式計算機。 研究者有時在半導體晶片上培養神經組織,並且從這些神經細胞記錄信號或對其進行刺激。這類研究常稱為“神經電子學”(Neuroelectronics)或“神經晶元”(Neurochips)。 1997年,加州理工Jerome Pine和Michael Maher的團隊最先宣稱研製成功神經晶元。 該晶元集成了16個神經元。
2003年,美國南加州大學的Theodore Berger小組開始研製能夠模擬海馬功能的神經晶元。該小組的目標是將這種神經晶元植入大鼠腦內,使其稱為第一種高級腦功能假體。他們之所以選擇海馬作為研究對象為其高度有序的組織以及豐富的研究文獻。海馬體的功能與記憶生成和長期記憶有關。
佛羅里達大學的Thomas DeMarse用提取自大鼠腦的包含25000個神經元的培養物來操控一個F-22戰鬥機模擬程序。這些神經元提取自大腦皮層,離體以後,它們在培養皿上迅速集結成活的神經元網路,並且與60個電極通訊,來控制戰鬥機的上下和左右搖擺運動。該項目的主要目的是研究人類的腦在細胞層面上如何學習特定的計算任務。
浙醫二院、浙大研究院腦機介面研究有重大進展
關於腦機介面的倫理學爭論尚不活躍,動物保護組織也對這方面的研究關注也不多。這主要是因為腦際介面研究的目標是克服多種殘疾,也因為腦機介面通常給予病人控制外部世界的能力,而不是被動接受外部世界的控制。(當然視覺假體、人工耳蝸等感覺修復技術是例外。)
有人預見,未來當腦際介面技術發展到一定程度后,將不但能修復殘疾人的受損功能,也能增強正常人的功能。例如深部腦刺激(DBS)技術和RTMS等技術可以用來治療抑鬱症和帕金森氏病,將來也可能可以用來改變正常人的一些腦功能和個性。又例如,上文提及的海馬體神經晶元將來可能可以用來增強正常人的記憶。這可能將帶來一系列關於“何為人類”、“心靈控制”的問題爭論。

阿凡達
2021年1月19日,“人機預言”成真,腦機介面走向醫學遠方。
2021年5月20日,發表在《科學》雜誌上的一篇論文中,美國匹茲堡大學康復神經工程實驗室的生物工程師團隊描述了一種新的腦機介面技術應用,即如何通過增加大腦刺激來喚起觸覺,從而使操作者更容易操縱大腦控制的機械臂。這種腦機介面不僅依賴視覺,還模仿了觸覺,極大地提高了四肢癱瘓患者用腦控機械臂操縱物體的能力。
基本信息
- 中文名
- 腦機介面
- 外文名
- brain-computer interface
- 別名
- 大腦埠
- 簡稱
- BCI