濾波
過濾特定頻段信號的操作
濾波(Wave filtering)是將信號中特定波段頻率濾除的操作,是抑制和防止干擾的一項重要措施。濾波分為經典濾波和現代濾波。
濾波
濾波是將信號中特定波段頻率濾除的操作,是抑制和防止干擾的一項重要措施。是根據觀察某一隨機過程的結果,對另一與之有關的隨機過程進行估計的概率理論與方法。
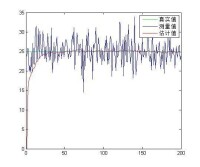
濾波一詞起源於通信理論,它是從含有干擾的接收信號中提取有用信號的一種技術。“接收信號”相當於被觀測的隨機過程,“有用信號”相當於被估計的隨機過程。例如用雷達跟蹤飛機,測得的飛機位置的數據中,含有測量誤差及其他隨機干擾,如何利用這些數據儘可能準確地估計出飛機在每一時刻的位置、速度、加速度等,並預測飛機未來的位置,就是一個濾波與預測問題。這類問題在電子技術、航天科學、控制工程及其他科學技術部門中都是大量存在的。歷史上最早考慮的是維納濾波,後來R.E.卡爾曼和R.S.布西於20世紀60年代提出了卡爾曼濾波。現對一般的非線性濾波問題的研究相當活躍。

濾波

濾波
只允許一定頻率範圍內的信號成分正常通過,而阻止另一部分頻率成分通過的電路,叫做經典濾波器或濾波電路。實際上,任何一個電子系統都具有自己的頻帶寬度(對信號最高頻率的限制),頻率特性反映出了電子系統的這個基本特點。而濾波器,則是根據電路參數對電路頻帶寬度的影響而設計出來的工程應用電路。

濾波

濾波
2、當允許信號中較低頻率的成分通過濾波器時,這種濾波器叫做低通濾波器。
3、設低頻段的截止頻率為fp1,高頻段的截止頻率為fp2:
1)頻率在fp1與fp2之間的信號能通過其它頻率的信號被衰減的濾波器叫做帶通濾波器。
2)反之,頻率在fp1到fp2的範圍之間的被衰減,之外能通過的濾波器叫做帶阻濾波器。

濾波
濾波

濾波
對於濾波器,增益幅度不為零的頻率範圍叫做通頻帶,簡稱通帶,增益幅度為零的頻率範圍叫做阻帶。例如對於LP,從-w1到w1之間,叫做LP的通帶,其他頻率部分叫做阻帶。通帶所表示的是能夠通過濾波器而不會產生衰減的信號頻率成分,阻帶所表示的是被濾波器衰減掉的信號頻率成分。通帶內信號所獲得的增益,叫做通帶增益,阻帶中信號所得到的衰減,叫做阻帶衰減。在工程實際中,一般使用dB作為濾波器的幅度增益單位。
按照濾波是在一整段時間上進行或只是在某些採樣點上進行,可分為連續時間濾波與離散時間濾波。前者的時間參數集T可取為實半軸【0,∞)或實軸(-∞,∞);後者的T可取為非負整數集{0,1,2,…}或整數集{…,-2,-1,0,1,2,…}。設X={X,t∈T={Y,t∈T)有窮,即其中X為被估計過程,它不能被直接觀測;Y為被觀測過程,它包含了X的某些信息。用表示到時刻t為止的觀測數據全體,如果能找到中諸元的一個函數?(),使其均方誤差達到極小,就稱為Xt的最優濾波;如果取極小值的範圍限於線性函數,就稱為Xt的線性最優濾波。可以證明,最優濾波與線性最優濾波都以概率1惟一存在。對於前者,憫t就是Xt關於σ()(生成的σ域)的條件期望,記作對於後者,若進一步設均值EXt呏EYt呏0,則憫t就是Xt在所張成的希爾伯特空間上的投影,記作如果(X,Y)是二維正態過程,則最優濾波與線性最優濾波是一致的。

濾波

濾波

濾波

濾波
歷史上最先考慮的是寬平穩過程(見平穩過程)的線性預測和濾波問題,它的一般模型是Yt=Xt+Nt,其中(X,N)為二維寬平穩過程或序列,其譜分佈函數已知,其均值為零。設從-∞到時刻t為止的全部Y的值都已被觀測到,求X的τ步線性預測及其均方誤差。如果限於考慮N=0、τ>0的情形,則變成在無誤差觀測條件下X本身的線性預測問題;如果N≠0、τ≤0,則變成從受到雜訊N干擾的接收信號Y中提取有用信號X的濾波問題。1939~1941年,Α。Η.柯爾莫哥洛夫利用平穩序列的沃爾德分解(見平穩過程),給出了線性預測的一般理論與處理辦法,隨即被推廣到連續時間的平穩過程。N.維納則在1942年對於平穩序列與過程的譜密度存在且滿足某種正則條件的情形,利用譜分解導出了線性最優預測和濾波的明顯表達式,即維納濾波公式,並在防空火力控制、電子工程等部門獲得了應用。上述模型在50年代被推廣到僅在有限時間區間內進行觀測的平穩過程以及某些特殊的非平穩過程,其應用範圍也擴充到更多的領域。至今它仍是處理各種動態數據(如氣象、水文、地震勘探等)及預測未來的有力工具之一。
維納濾波公式是通過平穩過程的譜分解導出的,難以推廣到較一般的非平穩過程和多維情形,因而應用範圍受到限制。另一方面,在不斷增加觀測結果時,不易從已算出的濾波值及新的觀測值較簡單地求出新的濾波值,特別是不能滿足在電子計算機上快速處理大量數據的需要。

濾波
濾波
由於高速電子計算機的發展以及測定人造衛星軌道和導航等技術問題的需要,R.E.卡爾曼與R.S.布西於20世紀60年代初期提出了一類新的線性濾波的模型與方法,通稱為卡爾曼濾波。其基本假設是,被估計過程X為隨機雜訊影響下的有限階多維線性動態系統的輸出,而被觀測的Yt則是Xt的部分分量或其線性函數與量測雜訊的疊加,這裡並不要求平穩性,但要求不同時刻的雜訊值是不相關的。此外,觀測只需從某一確定時刻開始,而不必是無窮長的觀測區間。更重要的是,適應電子計算機的特點,卡爾曼濾波公式不是將估計值表成觀測值的明顯的函數形式,而是給出它的一種遞推演演算法(即實時演演算法)。具體地說,對於離散時間濾波,只要適當增大X的維數,就可以將t時刻的濾波值表成為前一時刻的濾波值與本時刻的觀測值Yt的某種線性組合。對於連續時間濾波,則可以給出與Yt所應滿足的線性隨機微分方程。在需要不斷增加觀測結果和輸出濾波值的情形,這樣的演演算法加快了處理數據的速度,而且減少了數據存貯量。卡爾曼還證明,如果所考慮的線性系統滿足某種“可控性”和“可觀測性”(這是現代控制理論中由卡爾曼提出的兩個重要概念),那麼最優濾波一定是“漸近穩定”的。大致說來,就是由初始誤差、舍入誤差及其他的不準確性所引起的效應,將隨著濾波時間的延長而逐漸消失或趨於穩定,不致形成誤差的積累。這在實際應用上是很重要的。
卡爾曼濾波也有多種形式的推廣,例如放寬對雜訊不相關性的限制,用線性系統逼近非線性系統,以及所謂“自適應濾波”,等等,並獲得了日益廣泛的應用。

非線性濾波
基本信息
- 中文名
- 濾波
- 外文名
- Wave filtering
- 運用領域
- 信號傳輸
- 類型
- 專業術語
- 分類
- 經典濾波和現代濾波
- 用於
- 抑制和防止干擾
- 實質
- 將信號中特定波段頻率濾除的操作
- 注音
- lǜ bō