狀態觀測器
R.W.巴斯等人提出的概念
狀態觀測器
State Observer
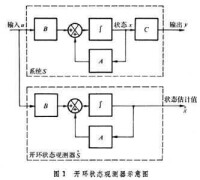
根據系統的外部變數(輸入變數和輸出變數)的實測值得出狀態變數估計值的一類動態系統,也稱為狀態重構器。60年代初期,為了對控制系統實現狀態反饋或其他需要,D.G.呂恩伯格、R.W.巴斯和J.E.貝特朗等人提出狀態觀測器的概念和構造方法,通過重構的途徑解決了狀態的不能直接量測的問題。狀態觀測器的出現,不但為狀態反饋的技術實現提供了實際可能性,而且在控制工程的許多方面也得到了實際應用,例如複製擾動以實現對擾動的完全補償等。
①以s 的外部變數(輸入變數和輸出變數)為其輸入變數。
②是穩定的。
③的輸出變數是原系統s的狀態變數x的實時估計值,與x之間的偏差隨時間的衰減應滿足一定的快速性。
狀態觀測器
採用閉環方式構成的狀態觀測器能克服開環狀態觀測器的缺點。漸近狀態觀測器就是一種閉環狀態觀測器。在這種觀測器中,被觀測系統的輸出變數y提供對觀測器系統的校正作用。圖中M是一個常係數矩陣,當被觀測系統為能觀測(見能觀測性)時,可用極點配置方法適當選取M中各元素的數值,把矩陣A-MC 的全部特徵值移到適當的位置上,使狀態觀測器滿足指定的快速性要求。漸近狀態觀測器在抗干擾性和靈敏度方面要比開環狀態觀測器好得多。
開環狀態觀測器和漸近狀態觀測器的維數都與被觀測系統的維數相同。另一類狀態觀測器稱為降維觀測器,它也是按閉環方式構成的。如果被觀測系統的維數為n,其輸出矩陣C 的秩為m,則降維觀測器的維數為n-m。降維觀測器是依靠從被觀測系統的輸出y中直接獲取狀態x的部分信息的途徑來實現降維的。這類觀測器維數較低,構造較簡單,更有實用意義。
基本信息
- 中文名
- 狀態觀測器
- 外文名
- state observer
- 線性定常系統
- s=(A,B,C)
- 實際應用
- 複製擾動以實現對擾動的完全補償