微型機器人
微型機器人
微型機器人(micro robot)是典型的微機電系統。世界各國已經在微型機器人的研究方面取得了不少成果。
微型機器人的體形很小,和蜻蜓或蒼蠅一樣大,有的甚至更小,小到我們看不見它們。
微型機器人的發展依賴於微加工工藝、微感測器、微驅動器和微結構四個方面。這四個方面的基礎研究有三個階段:器件開發階段、部件開發階段、裝置和系統開發階段。現已研製出直徑20微米、長150微米的鉸鏈連桿,200微米×200微米的滑塊結構,以及微型的齒輪、曲柄、彈簧等。貝爾實驗室已開發出一種直徑為400微米的齒輪,這種發明使用在一張普通郵票上可以放6萬個齒輪和其他微型器件。德國卡爾斯魯核研究中心的微型機器人研究所,研究出一種新型微加工方法,這種方法是X射線深刻蝕、電鑄和塑料膜鑄的組合,深刻蝕厚度是10~1000微米。
微型機器人的發展,是建立在大規模集成電路製造技術基礎上的。微驅動器、微感測器都是在集成電路技術基礎上用標準的光刻和化學腐蝕技術製成的。兩者之間不同的是集成電路大部分是二維刻蝕的,而微型機器人則完全是三維的。微型機器人和超微型機器人已逐步形成一個牽動眾多領域向縱深發展的新興學科,它的影響力度是相當高的。

微型機器人
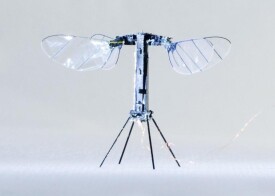
該微型機器人的名稱為RoBeetle,不同於其他依靠電池或外接電線驅動的微型機器人,它的能量來源是甲醇。它長15毫米,質量只有88毫克(大約相當於三粒大米),卻可以拖運其自身重量2.6倍的物體。它能夠攜帶95毫克的燃料,燃料最多可以為其供電2個小時。
微型機器人要有自動行走(或爬行)的能力,就必須有行走機構。現在微機器人的行走機構主要有:
①輪式行走機構,只適宜在較平坦的地面上行駛。
②履帶式行走機構,可以在不平坦的地面上行駛。
③用腳行走,用得最多的是四腳和六腳的行走機構,如要求在不平坦的地面上行走,則機構較複雜。
④靠慣性或自動伸縮的步進蠕動式行走機構。
⑤在液體中用螺旋槳或其他方式推動前進的驅動機構。
目前,開發的微型機器人有以下三大類:
(1)固定型微型機器人。其外觀像石頭、樹木、花草,裝有各種微型感測器,可以探測出人體的紅外輻射、行走時的地面振動、金屬物體移動造成的磁場變化等,並將信號傳送到中央指揮部,指揮部可控制防禦區內的武器自動發起攻擊。
(2)機動式的微型機器人。它們裝備有太陽能電池板和計算機,可以按照預定程序機動進入敵人陣地與敵人同歸於盡。
(3)生物型微型機器人。研究將微型感測器安裝到動物或昆蟲身上,構成微型生物機器人,使其進人人類無法到達的地方,執行戰鬥或偵察任務。
鑒於微型機器人巨大的技術潛力和應用前景,美國國家航空航天局(NASA)噴氣推進實驗室(NASA/JPL)和DARPA合作,從1996年起制定出一系列計劃,進行空間和軍用微型機器人的研究開發。例如,火星漫遊微型機器人Sojourner於1997年7月在火星著陸,長60 em,高和寬分別為30 C1TI,自重約為11 kg,裝有攝像機和多種感測器等。
微型機器人可以在原子級水平上工作。例如,外科醫生能夠遙控微型機器人做毫米級視網膜開刀手術,在眼球運動的條件下,切除彈性視網膜或個別病理細胞,接通切斷的神經;在患者體內或血管中穿行,一旦發現癌細胞就立即把它們殺死以及颳去主動脈上堆積的脂肪等;可以將微型機器人胃鏡放進胃內對胃進行全面檢查。
微型機器人還可以用於精密製造業的加工,用它製造存儲量更大的電腦存儲晶元,以及加工精度極高的“超平面磨床”等。微型機器人的作業能力達到了分子、原子級水平,已遠遠超過了藝術家在頭髮絲上作畫的程度了。
應用微型機器人技術,可以使各種各樣的航天測量變得更為輕巧,磁帶錄音機之類的家用電器也會變得更加小巧和多用,電視屏幕可以做得又大又薄,其上各點的光亮度,是直接可以用微型機器人自動控制的。微型機器人也將使機械學發生一場革命。
微型和超微型機器人的應用領域非常廣闊,它可以用於航海、農業、通信、航空航天、家庭和醫療等方面。例如:扔下成千上萬個微型機器人去咀嚼輪船底部的貝類和苔蘚,能節省航行能源;將成千上萬個微型機器人撒在莊稼地內,讓它們去咬死害蟲,減少農業的損害使之有好收成;飛行微型機器人載著濕度儀和紅外感測器在田野上飛翔,當發現農田有乾旱現象時,便降落在灌溉系統的閥門上,將乾旱信息傳輸給感測器,打開閥門,定量灌溉農田。
微型機器人可以攜帶攝像機和微型光纖,進人人類無法到達的地方去察環境,存儲或傳輸圖像。當地下電纜斷了以後,讓數萬個微型機器人沿著電纜爬行,爬到斷頭時,便讓“雙手”搭在前端斷頭上,於是微型機器人便成為連接導線,永久留在電纜上。
除了上面的功能之外,微型機器人每天晚上還可以在商店和倉庫附近放哨,防止盜竊者進入,並且,微型機器人還可以在住房隱蔽處除塵,進人家用電器內部檢查和維護。
基本信息
- 中文名
- 微型機器人
- 外文名
- micro robot
- 性質
- 機器人
- 特點
- 體型小