水下攝象機
水下攝象機
水下攝像機,又名水下攝影機,採用高質量電纜為視頻傳輸控制線,外加控制箱,放線絞車等輔助控制設備組成的水下攝像系統。主要應用於石油、深水探測,水下作業,海洋漁業等水下領域。主要功能是測量,監控,勘探等等。可以在水下用的攝影機,外加密封抗壓外殼,一般採用工業攝像機為核心部件。
高精度水下攝像機用於捕捉水下目標的高速移動(動作)相關視頻信號,完成對相關水下目標動作的監控及高速視頻的后處理分析。
隨著水中兵器、水下作業工具以及各種水下科學考察、水中試驗應用的不斷發展,研製高精度水下高速攝像系統的要求日益迫切,大深度、高清晰、緊湊的水下高速攝像系統具有廣闊的市場。
目前已有的水下高速攝像機普遍存在體積龐大、造價高昂等諸多問題,限制了水下攝像機的應用。
由於高速攝像技術發展迅速,更高解析度、更緊湊尺寸、更高速度攝像機層出不窮。新型高亮度照明技術也日益成熟,水下複合電纜及水密接頭日趨規格化,壓力容器及製造材料的性價比逐漸提高。這些積極因素進一步促進了水下高速攝像系統的發展。水下環境應用的特殊性,要求在水下 ( 特別是大深度條件下) 必須配置專用的水下照明設備,水下攝像機的拍攝性能 ( 攝像機本身的低照度和清晰度也是關鍵) 嚴重依賴於為目標照明燈光系統的質量 ( 燈光的純度) 、燈光的強度、眩光性和照明燈的配合部署等。
水下攝像機具有如下主要功能:
1) 高速、高清晰、低照度的攝像功能;
2) 水下0~10 MPa環境下能正常工作;
3) 攝像機拍攝距離為3m,視閾≥4 m × 4 m;
4) 具有各種遠距離操控功能;
5) 遠距離視頻傳輸及視頻回放功能;
6) 大容量 ( ≥16 GB) 視頻存儲及錄製功能;
7) 視頻后處理及相關的高速運動分析功能。
根據高精度水下攝像系統的技術要求,水速攝像機主要組成部分如下:
3) 水下安裝固定及調節支架;
4) 水下電纜傳輸部分,包括水下攝像機及照明燈用的水下複合電纜、水下攝像機用水下乙太網電纜、水密接頭;
5) 水面傳輸及水面控制單元。
對水下攝像機進行承壓、水密加固、光學視場等處理,從而滿足系統在技術性能、使用環境等方面的要求。
水下高速攝像機承壓殼體的總體設計主要包括如下幾個關鍵部分:水下高速攝像機耐壓殼體設計、承壓光學玻璃的密封設計、水下連接器的密封設計以及水下攝像機內部安裝布置的設計等(如圖)。同時高速攝像機與超廣角鏡頭以及承壓光學玻璃的配合也是本水下高速攝像機改造設計的關鍵。
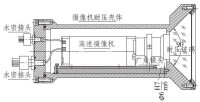
水下攝像機裝配示意圖
依據高耐壓等級要求,綜合性價比、耐腐蝕性等多方面因素,水下攝像機耐壓殼體採用不鏽鋼。水下攝像機的殼體分為前部殼體、後部殼體 2 個部分。前部殼體主要放置光學玻璃,後部殼體主要放置高速攝像機、超廣角鏡頭和水密接頭。前部殼體和後部殼體之間通過焊接連接、密封。水下攝像機前部採用前頂環、預應力緊固件、玻璃內外密封部件實現前部殼體與光學玻璃的密封。水密接頭通過螺紋、密封圈密封在殼體後端面,攝像機通過後部安裝的方式安裝在耐壓殼體上。
高速相機、超廣角鏡頭、承壓玻璃以及水介質、視場均牽涉到光學及其光學傳播路徑的問題,是實現水下攝像系統功能和全部性能指標的關鍵。除了水的折射、散射、色散等干擾因素,水下相機的耐壓水密窗本身的色散也將干擾成像。這些將導致普通光學鏡頭面臨視場角變小、像質劣化等缺陷,設計專門的水下廣角鏡頭是必要的。在技術設計過程中要考慮承壓玻璃的厚度、承壓玻璃的折射率、承壓玻璃與鏡頭之間的距離、水的折射率等問題。這種類型的鏡頭除了需要克服一般的初級像差,還須克服由於孔徑較大帶來的高級像差,諸如高級球差和高級慧差,普通的反遠攝結構難以匹配這種大視場大相對孔徑的情況。二組元變焦鏡頭的短焦端具有大視場的特性,且相對孔徑具有較大的提升潛力。初始結構選定以後,代入水和耐壓水密窗材料的光學參數並優化。由於鏡頭具有大視場與大孔徑的特點,在優化過程中應著力控制像散與場曲。為此,在前組可使用較厚的鼓型透鏡,在後組可採用多片正負分離透鏡,使用高折射率鑭火石玻璃。
攝像機承壓玻璃採用航空有機玻璃澆注板。承壓光學玻璃採用錐狀設計,不僅減小承壓接觸面積 ( 減小承壓玻璃的厚度) ,且錐狀外形還不對高速攝像機的光路產生任何遮擋。
對於高精度水下攝像系統來說,水下照明燈的選擇關乎到水下照明系統的清晰度、水下環境的照度及水下環境可視距離等。目前通常採用水下固態冷光源 ( LED) 和水下特種燈泡型光源 ( 鹵素燈等) 2 種類型的水下照明燈。LED 照明燈由於具有其他照明形式無法比擬的長壽命、高可靠性、高光效、緊湊性、抗衝擊抗震性等特點成為水下照明的應用方向。特別是在高拍攝幀率條件下, LED水下燈不會產生頻閃影響
依據大深度高耐壓等級的要求,考慮性價比、強度、重量、耐腐蝕性、后處理複雜性等因素,水下攝像機的耐壓殼體採用不鏽鋼。水下照明燈的殼體分為前部殼體和後部殼體 2個部分。前部殼體主要放置光學玻璃,後部殼體主要放置照明燈光源、驅動電路、水密接頭。前部殼體和後部殼體之間通過焊接的形式進行固。照明燈前部採用前頂環、前壓環、雙層徑向密封圈的形式實現照明燈前部殼體與光學玻璃的密封。水密接頭通過螺紋、密封圈旋緊於殼體螺紋中。
水下照明燈承壓光學玻璃採用航空有機玻璃澆注板,根據水下照明燈的照明角度、照明光源的面積、光源的發光角度和出射角度、照明玻璃的承壓面積和厚度及玻璃的折射率進行綜合設計。
水下照明燈採用恆流源供電,驅動電路布置在光源的背板後部。水下照明燈直流電源由水面控制單元經過水麵電纜和水下電纜傳輸給水下照明燈,並由水面控制單元進行遠程調光控制。
水下攝像系統的水下電纜包括水下電源及控制複合電纜和水下乙太網複合電纜2種。根據高速攝像機的介面類型、芯數、電纜長度要求、浮力要求等規劃複合電纜中電纜的參數,複合電纜各芯線的屏蔽、雙絞等內容
水下複合電纜將水下攝像機的部分電纜芯線和 2 台水下照明燈的電纜複合到1根電纜中,並經過屏蔽、水密等處理由 3 對電源線 ( 分別是攝像機和照明燈的電源) 、4根雙絞線 ( 控制電纜) 及2根同軸電纜組成。
水下乙太網路複合電纜是一種專用的水下千兆乙太網路傳輸電纜,主要是實時傳輸水下的高速攝像機的圖像數據,其最大的耐壓等級可以達到 600 bar,最大傳輸速率在 100 m 以內可以達到 1 Gbps
水面控制單元用於完成對水下攝像系統中水下攝像機和水下照明燈的遠程控制和供電。控制部分用於實現攝像機的觸發控制、攝像機的同步、攝像機的網路連接、照明燈調光控制等。水面控制單元的供電部分用於實現攝像機供電、照明燈供電以及水面單元內部子設備的供電。