膠囊微型機器人
膠囊微型機器人
膠囊微型機器人,是一種能進入人體胃腸道進行醫學探查和治療的智能化微型工具,是體內介入檢查與治療醫學技術的新突破。目前該技術尚處於實驗階段,用於造福人類還需進一步的實驗確證。

膠囊微型機器人
2009年8月大連理工大學機械工程學院現代製造技術研究所張永順副教授撰文完成膠囊微型機器人磁場方法的無線驅動實驗,有望實現膠囊微型機器人在人體腸道內無線遊走而達到醫學探查、醫療之目的。
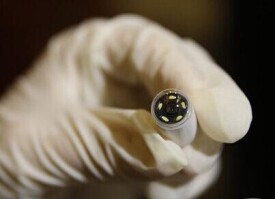
膠囊微型智能機器人整個系統由三個部分組成,體內微型檢查機器人實驗樣機本體、體內微型檢查機器人體外接收和處理系統以及體內微型檢查機器人定位與驅動控制系統。“智能膠囊”的外徑小於等於12mm,長度小於等於3.5mm。
體內介入檢查與治療具有安全、微創等優點,並迅速成為醫學工程領域的主流。人們研製出的微型消化道膠囊內窺鏡是利用消化道蠕動進行整個區域檢查,由內嵌CMOS微型攝像機以無線方式傳輸檢查圖像。但其行走緩慢,存在視覺盲區;錯過病變組織時,不能主動返程,使一些醫療作業無法完成。因此研製可吞咽並能通過體外無纜驅動控制的膠囊機器人已成當務之急。
膠囊微型機器人
由大連理工大學機械工程學院現代製造技術研究所張永順副教授擔任第一作者撰寫的《腸道內變徑膠囊微機器人空間磁力矩特性》一文提出的一種新型膠囊機器人樣機解決了在複雜非結構化腸道內的驅動問題。該文發表在《中國科學E輯:技術科學》( tech.scichina.com)2009年第7期上。這項研究工作的創新點在於他們提出了一種以相鄰異向徑向磁化多磁極永磁體為外驅動器產生旋轉磁場,驅動膠囊機器人在腸道內旋進的驅動控制方法,並提出了一種變徑螺旋結構膠囊機器人樣機,其外表面由四片可徑向伸展的外表纏繞螺旋肋的銅瓦組成,當機器人旋轉時,其外表面形成流體動壓保護膜,使腸道避免受損傷。在徑向間隙自補償和多楔形效應的作用下,顯著提高了流體動壓膜的壓力和在腸道內的驅動能力,並能實現在豬腸道內的垂直遊動。
大連理工大學機械工程學院現代製造技術研究所張永順副教授和課題組研製出利用旋轉磁場來驅動膠囊機器人在腸道內旋進的驅動控制方法。當機器人旋轉時,其外表面形成流體動壓保護膜,使腸道免受損傷。在離體豬腸實驗中,研究人員發現該機器人能實現在豬腸道內的垂直遊動。研究人員指出,該項目最終目標是通過體外無纜控制,由機器人實現窺視、診斷、施藥、取樣等介入醫療,有廣闊的應用前景。
膠囊微型機器人在人體腸胃中進行無創檢查和小損傷手術,對於減輕病人痛苦、提高檢查和手術的安全性和降低醫療費用都具有重要意義。現在國內治療腸胃病的一般方法是用內窺鏡透視、放射造影或手術檢查,不但費用高而且病人比較痛苦。而微型機器人不但成本低、節省時間,而且治療起來並不會給病人帶來痛苦。
膠囊微型機器人最終目標是構成體內窺視、診療為一體的醫療微型機器人系統,通過體外無纜驅動控制與姿態調整,安全地實施窺視、診斷、施藥、取樣等介入醫療作業。該研究對提高人類壽命與生活質量,避免外部手術對人體造成創傷與致殘具有重要的科學意義,一旦研製成功並應用於臨床,能減輕患者痛苦,縮短康復時間,降低醫療費用,必將對醫學工程的發展產生極大的影響。
基本信息
- 中文名
- 膠囊微型機器人